


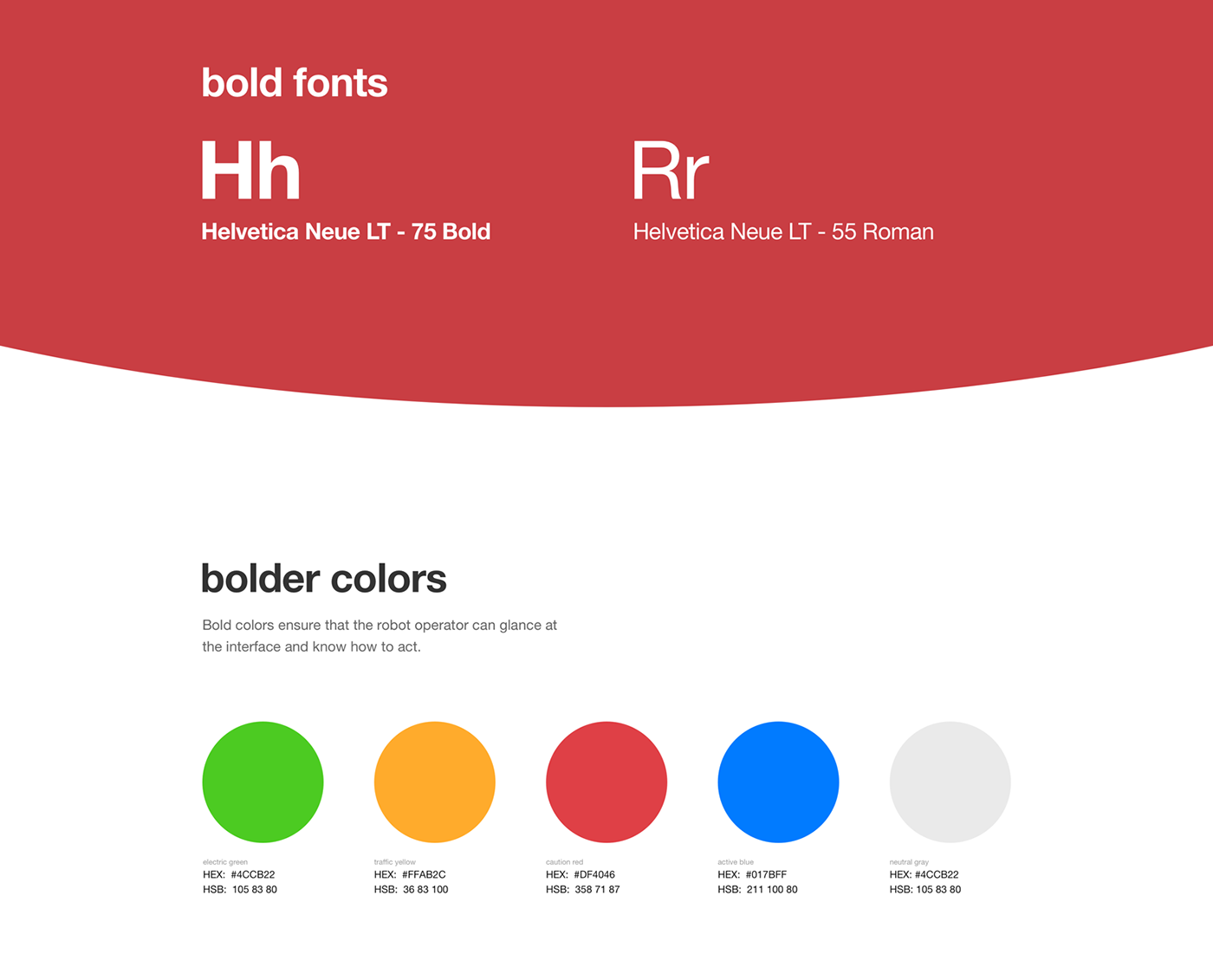



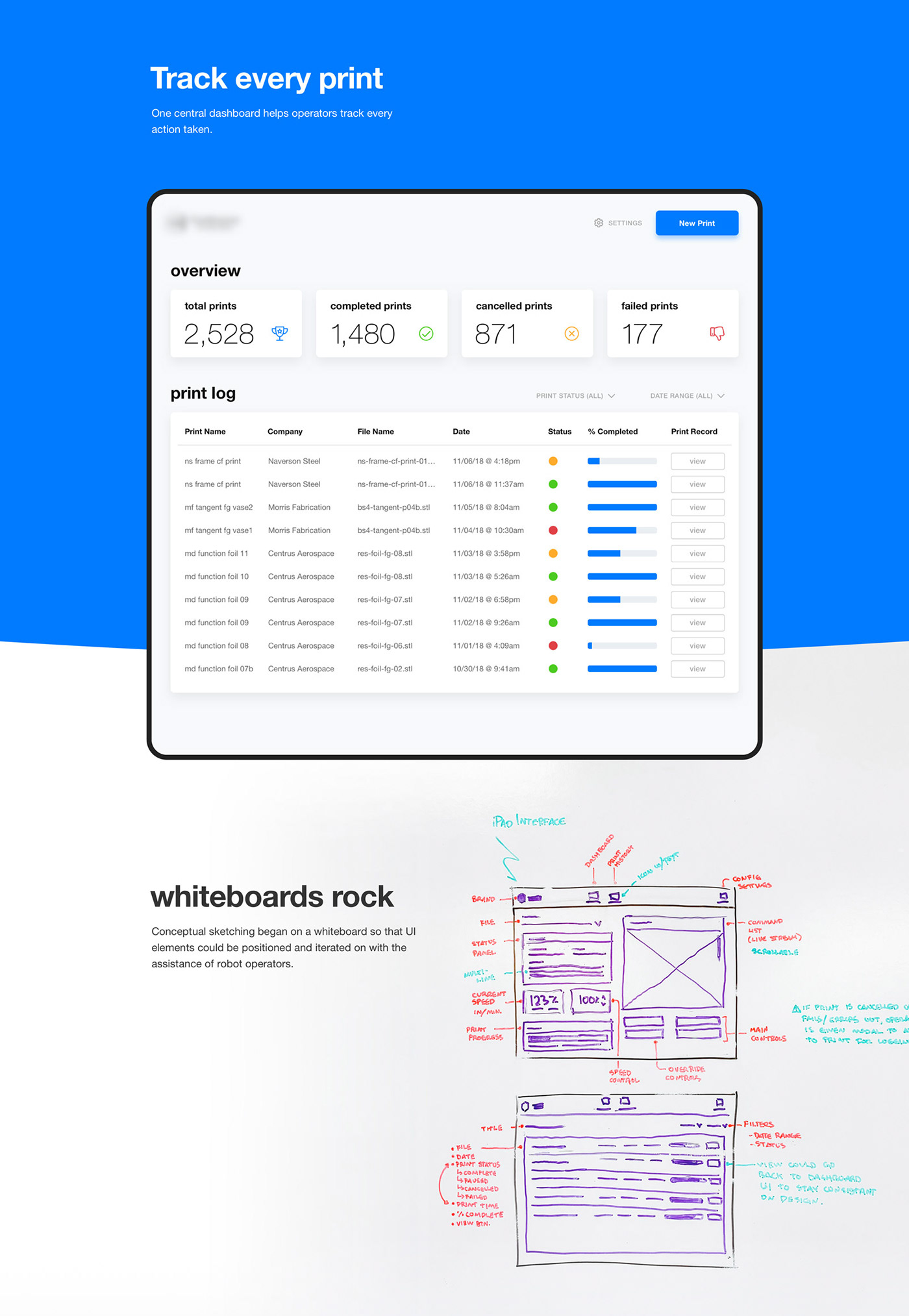
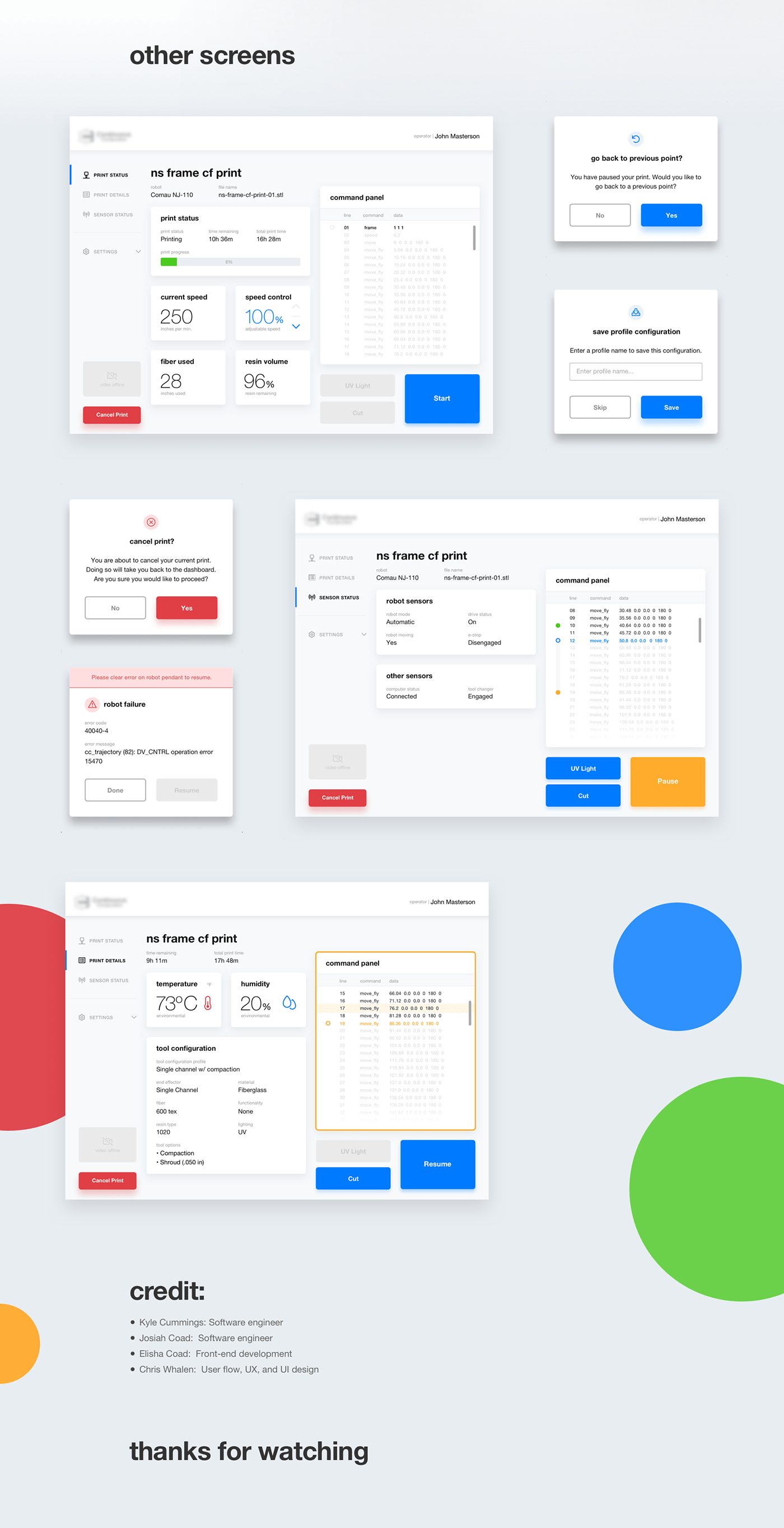
This touch screen interface was designed to allow industrial robot operators to monitor all environmental controls, robot movements, settings and monitor progress from a tablet device. This Robot Operating System system would be the main control interface where the operator can pause a print, monitor the print progress, and other robot actions. It was designed to log all print history for print recall and reprints, making it easy to trend the performance of any print. The system was designed to be released in two stages. First, the control interface with all print actions and functions. Second, the database to store all print logs. Additional print features such as; real-time camera recording, barcode assignment, and reprint controls were to be added after launch in smaller rollouts. Bold colors were chosen to ensure that the robot operator could glance at the interface and know how to act. Using a global color palette, the intention was to help the operator feel like ease. A deep dive into the user flow was drafted and refined over several iterations to ensure every experience was considered. Then it was paired down until all that was left was exactly what an operator would need to complete their objectives. Because robot operators need to be able to see any status at a glance and need to be able to take action fast, large widgets panels and target sizes were used to ensure little to no cognitive load on the user. An easy to use 2-step onboarding experience allows operators to build out print settings on the fly. When working with industrial robotic arms, security measures are a must. A pre-flight check of all sensors and drives ensures the operator is ready to begin a print before they can access the control interface. One central dashboard helps operators track every action taken. The UI was first explored using a whiteboard to ensure not any single UI element would be committed to without some healthy finger erasing.




