5v5 Multiagent Robot Soccer
For this project I worked on the mechanical aspects of design, prototyping, and manufacture of a custom fleet of 6 robots that autonomously play a game of soccer with an orange golf ball. My primary focus was on drive module design, and overall system integration. Manufacturing was done both in house and externally as parts and time required.
For this project I worked on the mechanical aspects of design, prototyping, and manufacture of a custom fleet of 6 robots that autonomously play a game of soccer with an orange golf ball. My primary focus was on drive module design, and overall system integration. Manufacturing was done both in house and externally as parts and time required.

A highlight reel from the 2011 RoboCup Held in Instanbul, Turkey.

An exploded view of the drive motors. A custom pinion shaft was developed to save space and eliminate the presence of set screws for retaining the gears (compared to previous design see 2008). The shaft also stuck out the back. This allowed the use of low cost miniature off the shelf encoders and high resolution closed loop control.

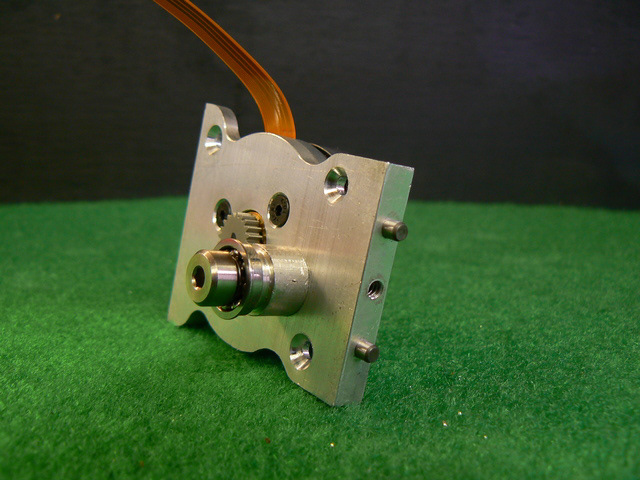
An up close of a fully assembled drive module mounted on a robot base. Here the encoder, modified motor, and omni wheel are clearly shown.
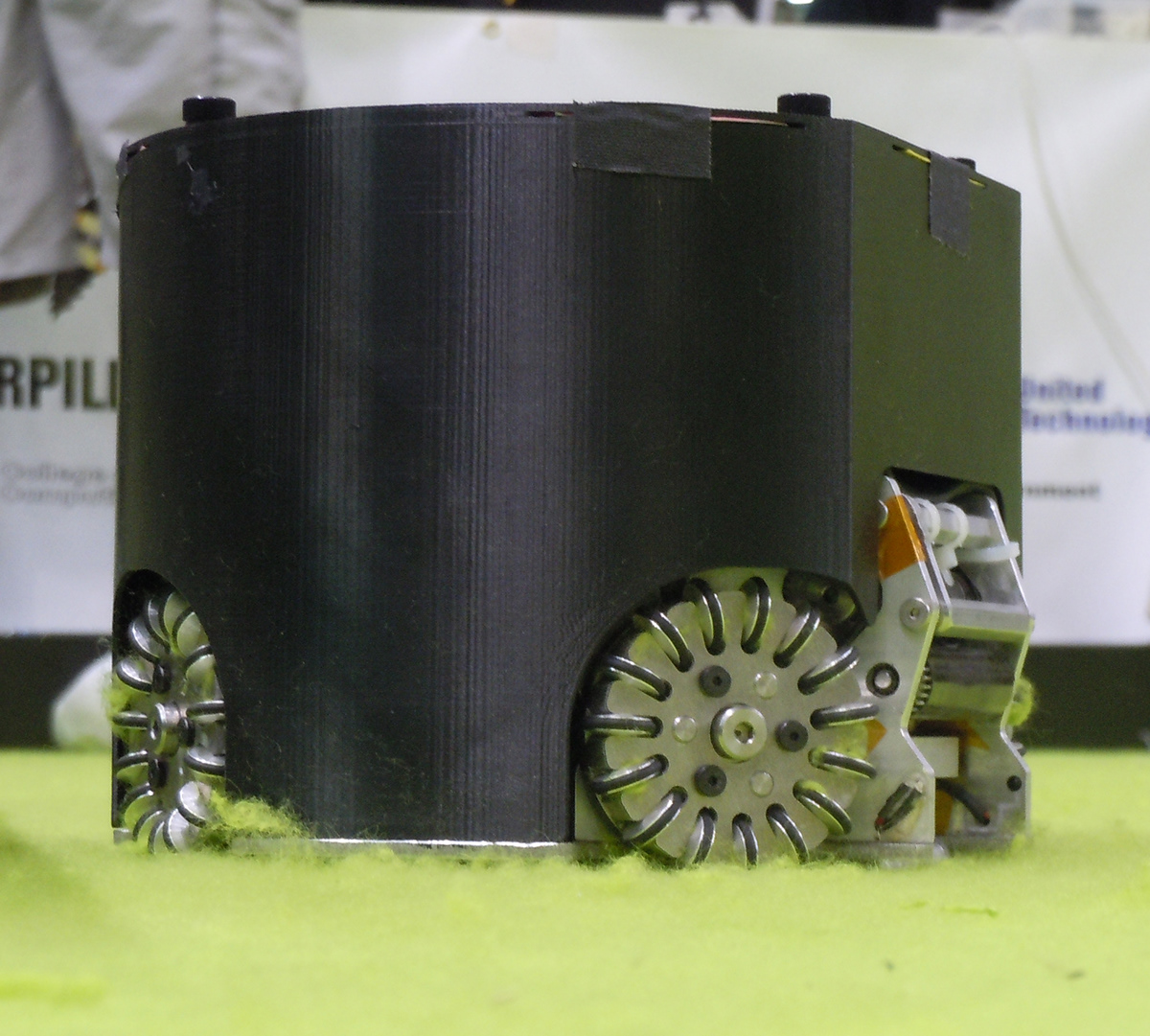
A robot sitting on the field at competition. In Turkey. All robots must have black shells, be no more than 180 mm in diameter, 150 mm tall, and cover no more than 20% of the golf ball when seen from above.
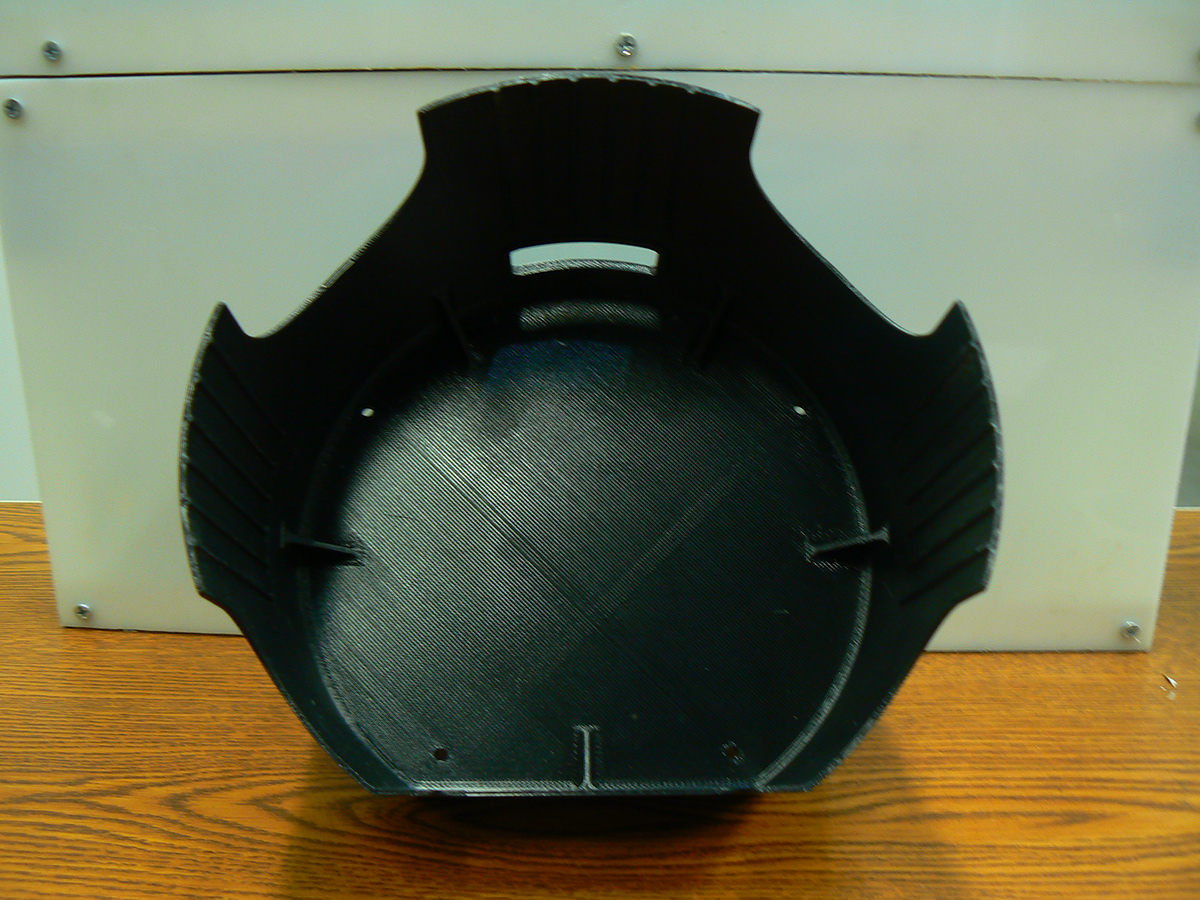
Inside of 3D Printed Shell showing ribs and gussets. 3D printed shells allowed us to slide in colored cards to speed up changing robot ID markings. Ribs and gussets were strategically placed. The gussets reinforced the top area. The ribs down the sides allowed for stiffening, promoted them to bend as a unit, and helped to spread the force of an impact out over a larger section. This was desired as a rear high speed impact from a golf ball on the lipo battery packs was not allowable. In case of an extreme hit the shell would break apart in sections and prevent a direct hit.

A mid stage rendering during development. Note the close proximity from the middle board and bottom board (both green). This was later increase to electromagnetic interference between the two during kicking.

A modified motor and the motor assembly jig developed. Since we could not afford to outsource the modifications, an in house solution was developed. This process would go through different revisions, but the original tool would remain the same.

A dribbler unit. Also held in by a combination of pins and screws. Overall design is a much more robust approach to the 2008 dribbler. This model had gears with bigger teeth, better bearings, and a pinion shaft. The larger teeth reduced the effect of the ball impact and carpet fiber. Assembly was made much easier with the presence of a pinion shaft. This shaft replaced three separate parts.
Dribbler plate


Omni wheel assembly

Earlier stage prototype.
