5v5 Robot Soccer (Old Fleet With Upgrades)
Mechanically this meant upgrading the dribbler, omni wheels, shells, and tweaking some integration related aspects of the top plate.
Mechanically this meant upgrading the dribbler, omni wheels, shells, and tweaking some integration related aspects of the top plate.
Video of the 2008 fleet conducting a game of soccer.
Pictures & Renders

2008 Robots with old shells you can see the paper tops. These tops were hand cut at the start of each competition and were sometime remade or fixed during.

Five 2008 robots sitting on the competition field at the 2010 RoboCup world event held in Singapore.
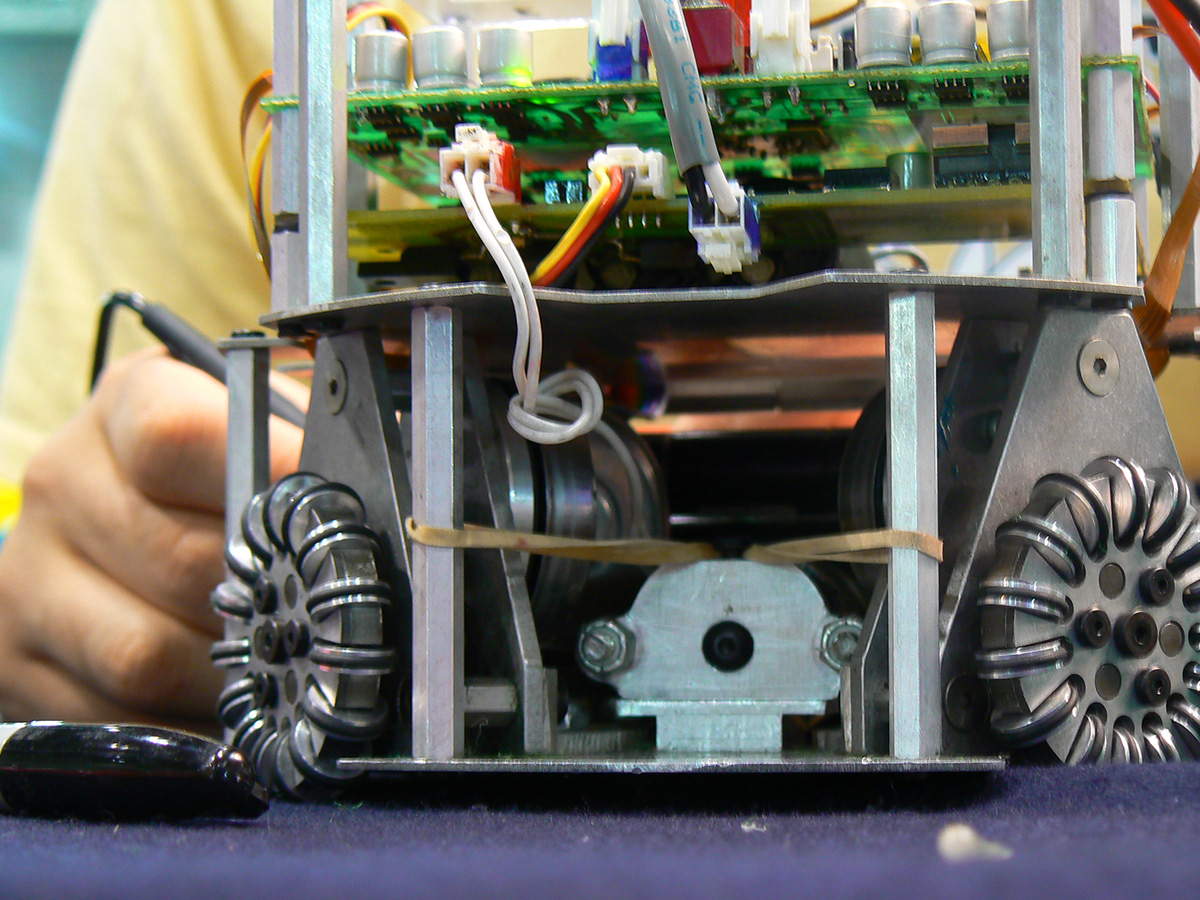
A rear internal view of a robot. With the move to lipos additional standoffs were added behind the kicker for improved battery protection. The top plate was also tweaked for battery accommodation by removing the notch and adding a hole as found on the 2011 fleet. These notches originally allow for flexibility in wire routing as the routing plan was not finalized before the plates were made.
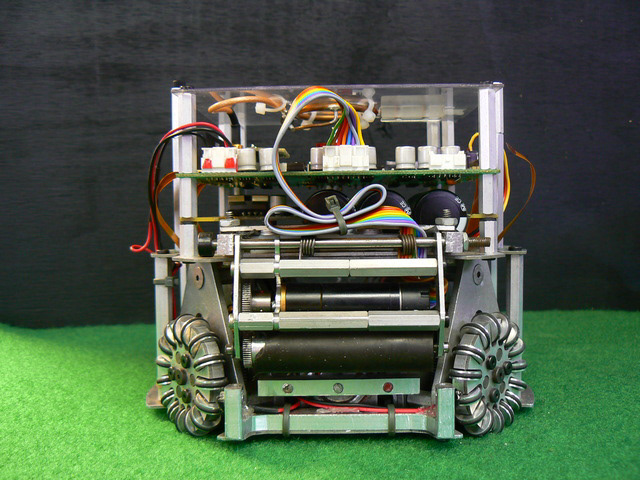
Here we can notice the old dribbler design. This had more parts than the newer one and was much harder to assemble. Two key sources of problems with the design were the very small teeth on the gears and the plastic snap in bushings. Notice the differences below with the new design installed. Missing are the springs and pivoting mechanism.


Above we see and prototype of the 2008 wheels and the plastic COTS wheels used in 2007. For the production version we removed the hex from the plat holding the omni rollers on and used the plate to also hold the wheel on the to the shaft. The hex size was also increased to lower the machining requirements (no longer making a 1/4" in round shaft from a 1/4" hex). We also added pins and removed the post features on the body of the wheel. This cut the cost of the wheels by more than half from the prototype to the production design.
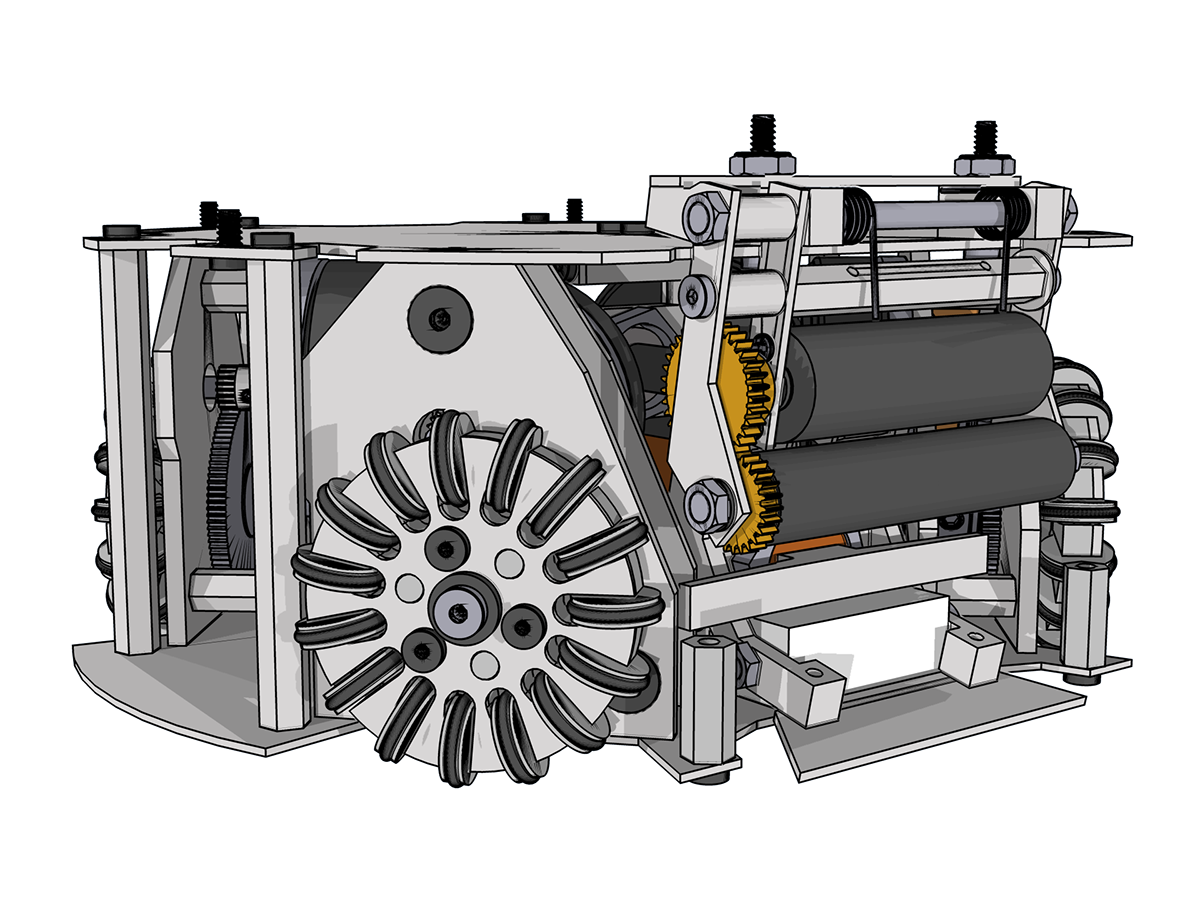
An early stage CAD rendering. Here were have a concept chipper that was dropped for space, time, and complexity reasons. Also reworked was the dribbler the geometry was completely redeveloped several times. We were going for a passively actuated system that could give some while receiving passes. It was later dicovered that initally this design was marginally stable under certain conditions.

Omni rollers. The part count for some items gets pretty high in all we needed over 400 rollers to accommodate a full fleet of wheels and spares.

Only four robots worth of assembled drive modules. Even though these took up a fair amount of space in the robots we could send out to them the water jetted and counter sink the plates once they arrived to finish machining. Next was left assembly with standard standoffs. It was a very simple and fast to assemble approach.
