
Kopernikus
an experimental prototyping platform to test and evaluate the vision of home robotics
The vision of home robotics is ubiquitous. As a transdisciplinary team of designers, technologists and researchers, we were looking for a way to prototype the concepts we've been working on.
The question becomes: how do you design AI? How can we build behavioural interfaces? One common example is robot navigation.
We want future robots to navigate through our apartments savely, in a manner that is understandable and predictable for humans. We want them to deal gracefully with unexpected obstacles and be efficient and save.
One of our key interests is Heuristic Problem Solving, which uses concepts from cognitive science to implement a decision process similar to that of humans (You can read up on HPS here, a Paper by our team member Alexandra Kirsch). Our goal is to use HPS as a general, cognitively inspired decision-making framework and use Kopernikus as a use case and testing environment to gain insights through practical experiences.
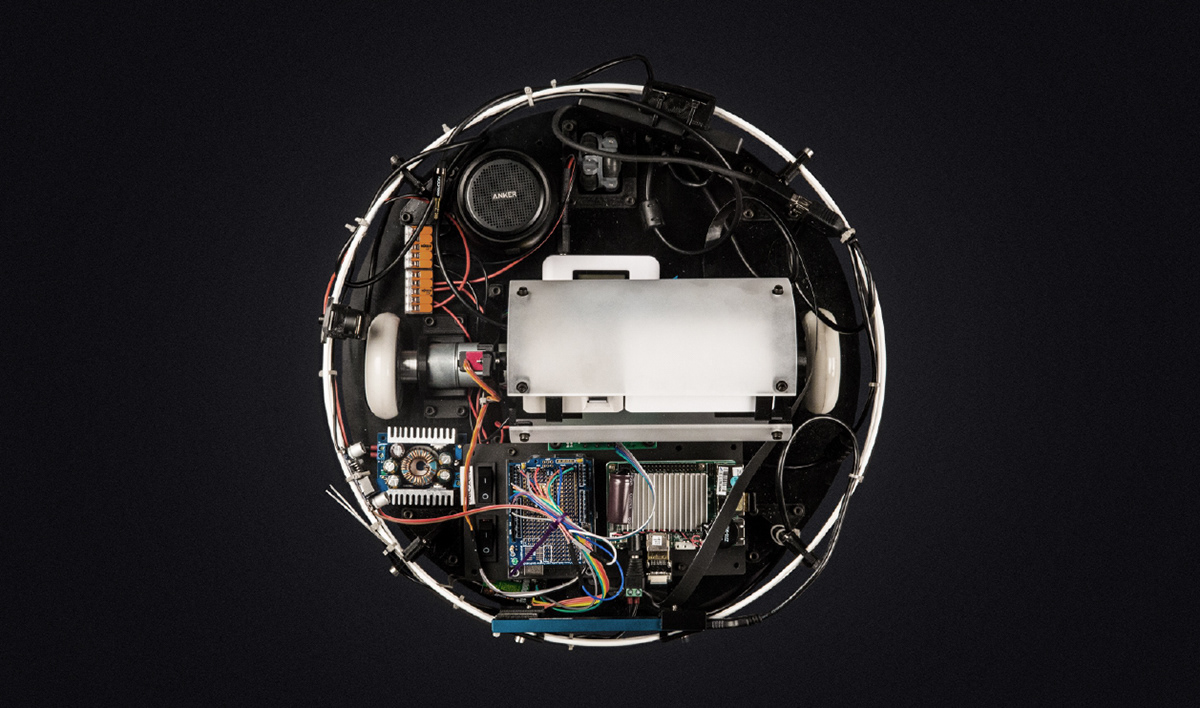
Kopernikus is a small robot, that will cost less than EUR1000 to build. If you put it together, you will have something like a remote control car, equipped with a quad core computer, a stereo camera, audio input and output and a video projector.
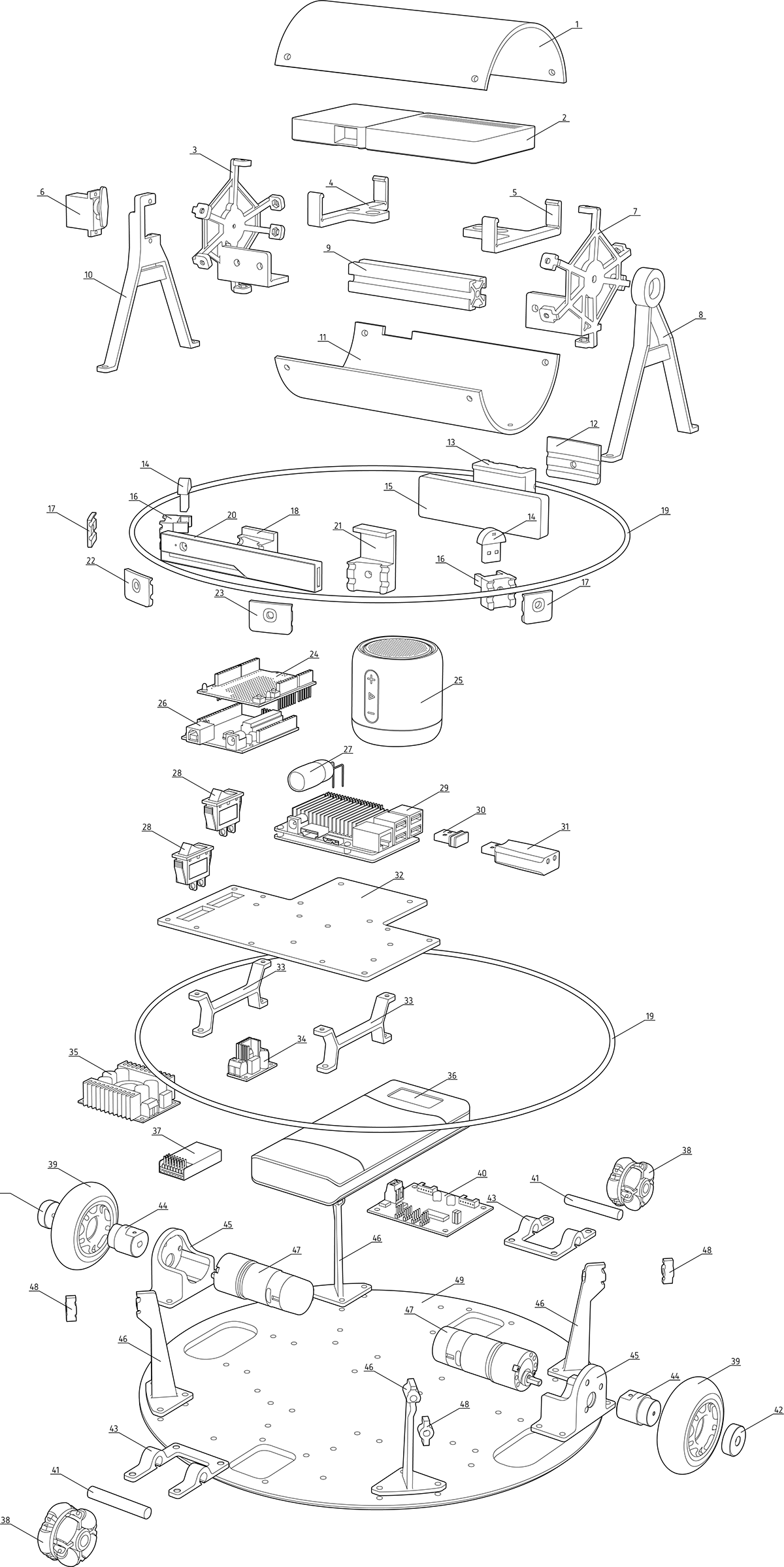
machined parts: 01. projector cover_top 11. projector cover_bottom 32. controller plate 41. aluminium rod 49. ground plate
3D printed parts: 03. drum cap_left 04. projector mount_left 05. projector mount_right 07. drum cap_right 08. drum stand_right 10. drum stand_left 12. usb hub mount_B 13. usb hub mount_A 16. microphone mount_A 17. microphone mount_B 18. camera mount_left_A 21. camera mount_right_A 22. camera mount_left_B 23. camera mount_right_B 33. controller plate mount 42. drive wheel pivot hub 43. omni wheel mount 44. drive wheel pivot pin 45. drive wheel motor mount 46. ring mount_A 48. ring mount_B
third party components: 02. laser projector celluon pico pro 06. servo motor HD-1810MG 09. aluminium extrusion nr. 5, 20cm 14. usb mini microphone 15. anker 4-port usb 3.0 hub 19. metal wire ring 20. camera 24. adafruit protoshield v6 25. anker soundcore mini speaker 26. arduino UNO 27. 4700µF 16V capacitor 28. toggle switch 29. up board 2gb/16gb 30. edimax wireless usb adapter 31. external usb sound card 34. step down power module 1A 35. step down power module 12A 36. power bank 12V-24V 37. rf receiver 38. omni wheel 39. drive wheel 40. motor driver md25 47. dc motor emg30
Kopernikus is an open-source software-hardware prototyping platform. You'll be able to use it as a basic setup and build your personal project on top.

It's open source (read our documentation)

it's DIY (cheap parts made with accessible tools)

designed for experimentation, prototyping & hacking
We've built Kopernikus for ourselves, as a platform to experiment with AI technologies, out of low priced electronic components with accessible tools, designed to be modified easily.
To enable more people to experiment with low cost robotics, we've decided to open source our hardware plans and software.
Please note that this is an early stage of development. We're not selling a product, but share our design and progress.
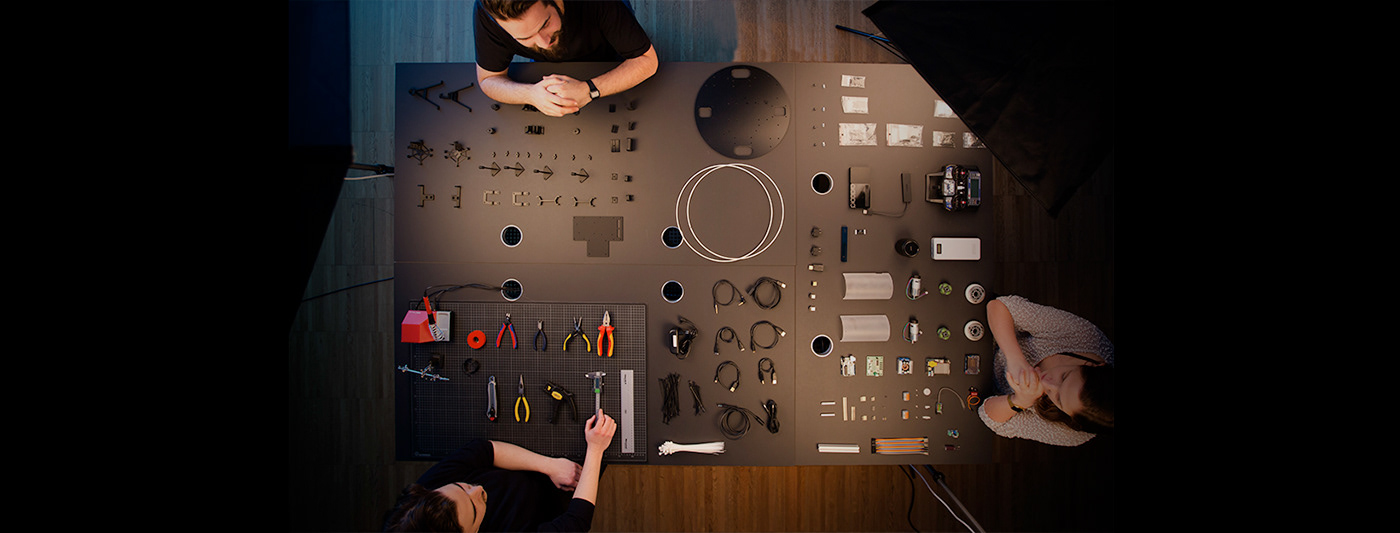
We've made a shopping list with everything you'll need to buy.
You can download all our CAD models for 3D printing and laser cut/CNC milling.
We have a git to look at our code.
Our ambition is to enable creative minds from any discipline to contribute towards shaping the future of robotics.

visit www.kopernikus.io

A Project by the Intuity Media Lab
Team: Steffen Süpple, Ludwig Rensch, Max Hans, Alexandra Kirsch
also visit www.aaiirr.net
supported by:



