
~SomaVision is a visualiser interface created using Arduino hardware and a PureData patch to create a system that produces a range of visuals for perfomative applications such as music visualisation etc.
The aim of the final project for MDD251, titled ~SomaVision was to combine the benefits of the two previous designs created for the paper:
V1 - Distortion_Unit (analogue video distortion system)
V2 - [VideoCaos] (digital visualiser interface)
The new design looks to rectify past issues with a heavy focus placed on creating a product that is stable enough for performance use without the fear of the software or hardware crashing mid-performance. This means finding ways to reduce CPU strain that the current Pd patches place on the laptop and ensuring that the electrical circuits are designed in such a way that they won't detach when the casing is moved.
~SomaVision promotional video featuring exerpts of a music video that used the visualiser system for background projections


Digital visualiser displaying infrared sensor and potentiometers used for controlling different PureData patch elements via Pduino firmata.

Visualiser in-situ with projected output in background.
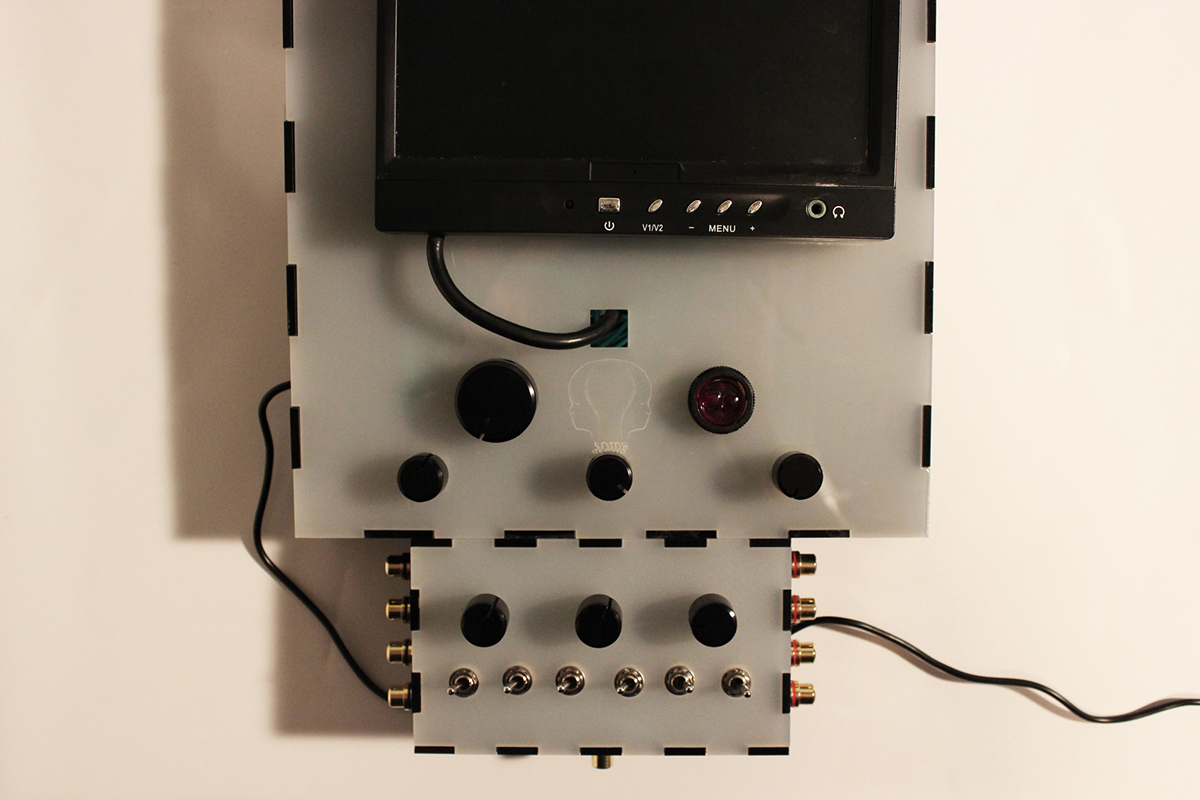

(Front) Analogue mixer based on the Distortion_Unit design | (Back) Digital mixer based on the [VideoCaos] design
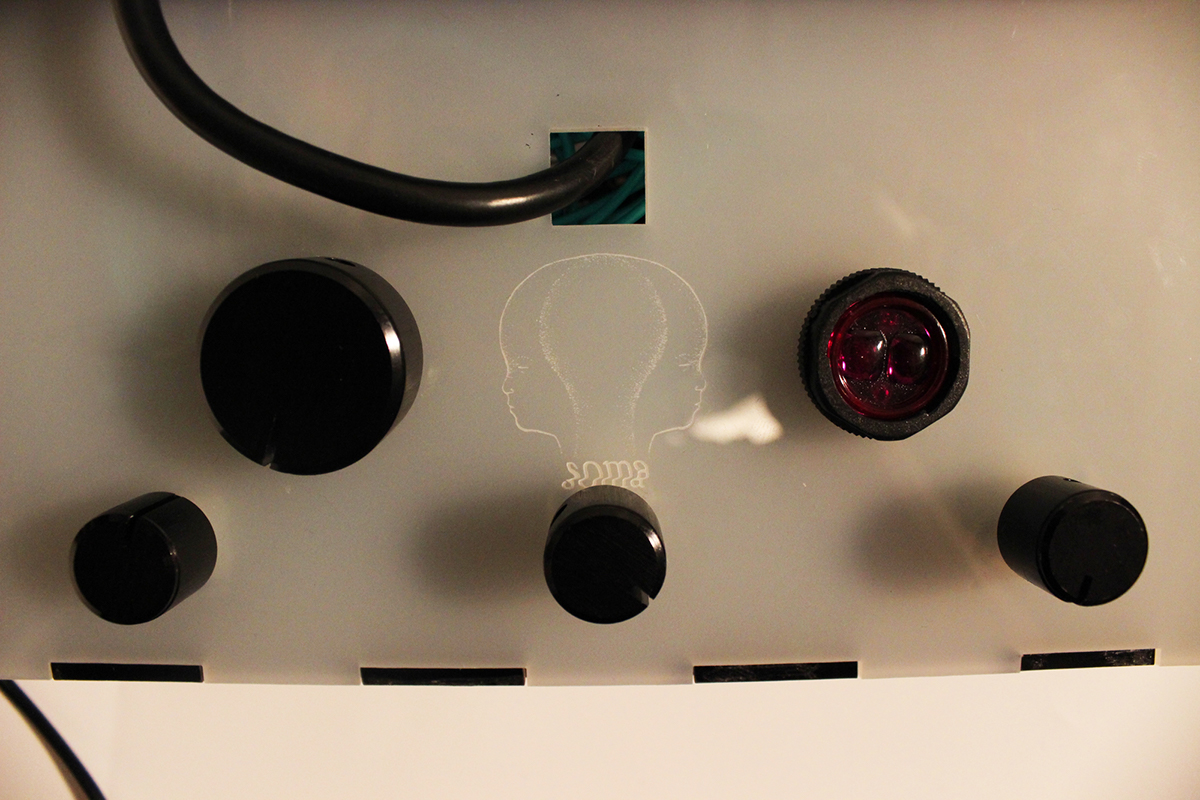
Although the controls of the hardware can be altered as to their use in the PureData patch, the current control layout is as follows:
(top left) - Signal Fader potentiometer | (top right) - Bicubic Blur IR sensor | (bottom left) - Sound reactor threshold potentiometer | (bottom centre) - Luma Offset potentiometer | (bottom right) - Fractal Output Angle potentiometer
(top left) - Signal Fader potentiometer | (top right) - Bicubic Blur IR sensor | (bottom left) - Sound reactor threshold potentiometer | (bottom centre) - Luma Offset potentiometer | (bottom right) - Fractal Output Angle potentiometer


