

2050 - LAND ROVER ICELANDER
In 2050, autonomous mobility is constantly used as driving was abandoned, having been deemed unnecessary by the population. As technologies develop, all objects become interconnected and information flows faster and faster. Cities are also developing and peri-urban areas are spreading over the rural area, reducing it drastically.
In this population, guided by these interconnected and automated objects, lacks are felt: lack of free will, lack of rurality, lack of different abilities ... This context pushes the townspeople to go further and more often on holiday, looking for rurality and disconnection.
The Land Rover Icelander allows a couple to travel to one of the most exotic countries in the world: Iceland. Thanks to this vehicle and by learning to drive, the couple will regain independence and autonomy. They will experience 3 types of disorientation: disorientation by the contrast of the mode of transport, disorientation by the contrast of the way of life and disorientation by the contrast of the environment. During 2 weeks of travel, the couple will be delivered to themselves, which will offer them a good opportunity to disconnect from everyday life.

________
PHASE 1 - FIELD STUDY
I had the chance to go to Iceland during the 2018 summer and experience their roads and paths. I stayed over two weeks and travelled through mountains, plains, snowy landscapes, rivers, driving on paved roads, gravel roads, paths, water... Having a drivable car made the experience particular as you can feel the surrounding hostile environment. But sometimes, driving is more a problem than a funny moment, when it's too complicated or just boring. The idea of having the possibility of an autonomous vehicle was therefore interesting. Here are different situations you can face in Iceland.







________
PHASE 2 - IDEATION PROCESS
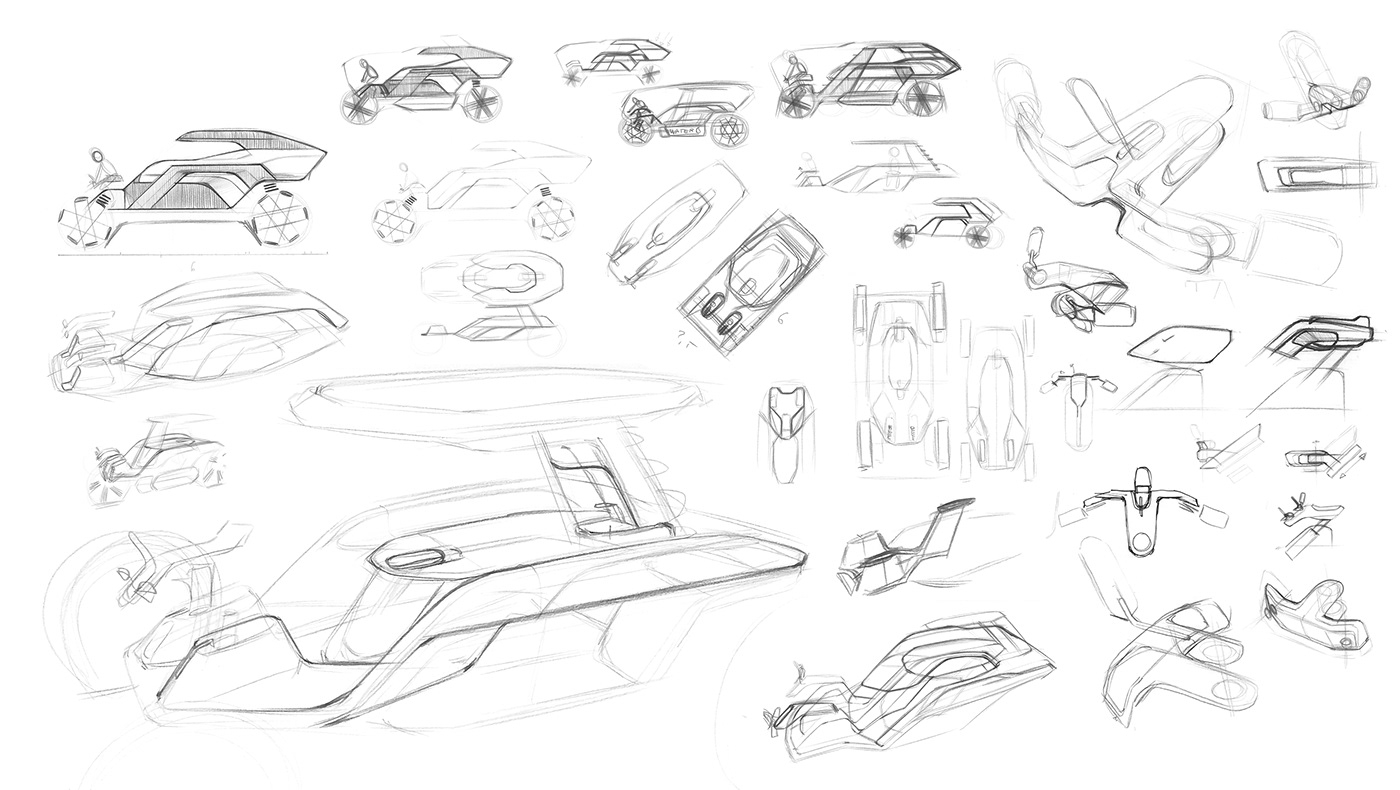
I've ben through many different phases and design to finally end up with something coherent and relevant. The first idea was to have one vehicle which can split in two different modules. The first of them was the rear part of the vehicle, which was autonomous and the second part, the front module, which was drivable when separated. The two modules combined, the vehicle was semi-autonomous, depending on roads and situations. The goal of this idea was to have a fluid experience, combining autonomous driving and non-autonomous driving, depending on the needs and desires of the users. For example, as the users are going on a ride with the little front module, which is easier to manipulate and funnier, the autonomous module can follow them on a much more drivable road or can go to the next camping site.
The problem of this architecture was that actually, most of the time the two vehicles will be driving on the same road. Moreover, in off-road driving, it is easier and handier to have at least several contact points with the ground (2 or more wheels) than one (one wheel, like the rendering). Finally, the longer the wheelbase is, the better it is to manipulate a vehicle when crossing or overcoming difficulties.

Trying to find the concept was not a simple thing to do. I knew I had an interesting idea about freedom and discovery but I didn't exactly how to describe and embody it. I wanted something to explore the country and to enable the users to feel as free as possible. In Iceland, it is strictly forbidden to go off-road as the nature is extremely well preserved. The travelers wouldn't be as free as I wanted them to. "So I thought about a drone, to take the travelers into the sky to let them see what Iceland is really about..." Seriously !? A drone ... ? No It couldn't be possible. It was too primitive and way much too complicated.
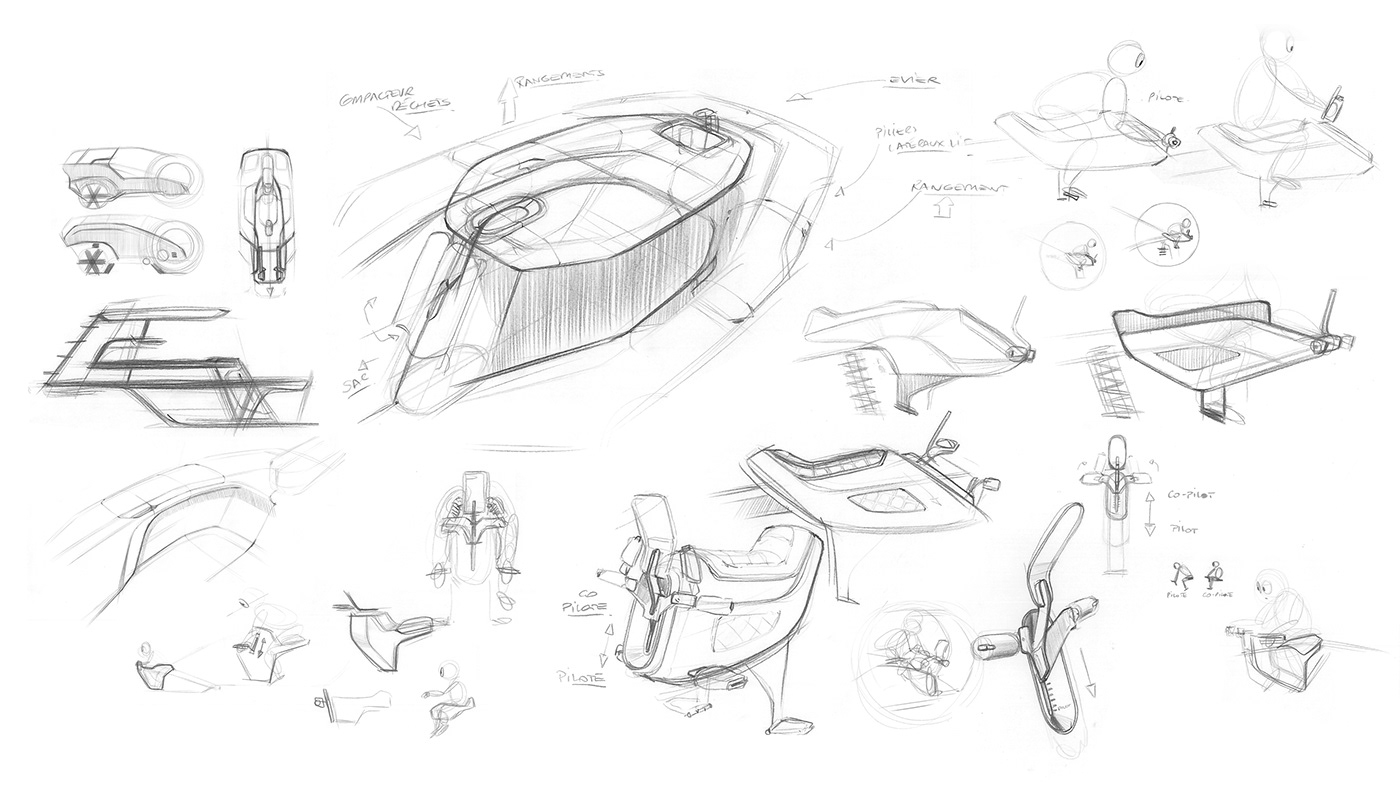
I then thought about a monobloc vehicle with, at least, four wheels. I tried to think about the interior architecture, which was, for me, more important than the exterior aspect. So I focused on interior and tried to define different positions inside the vehicle, when moving or camping.

I imagined a vehicle inspired of some modified Defenders I saw in Iceland. The vehicle had two seats in the front with a retractable steering wheel. The seats can merge together during special moments as the briefing. During this period, the travelers are briefed about the incoming day they are going to live. They had a big screen in front of them to see a bunch of information. For the rear part, like a RV, it had a middle table with a cooker and a sink surrounded by two benches with storage inside. The bed is located on the top of this part and can be accessed with stairs when the roof is up, so that they can stay inside the vehicle.
But having one bloc turned the vehicle into a massive and given RV without any personality.

I get back to the previous exterior aspect that I founded more original than the second one. I thought about all the technic parts to make something rather realistic (for an automotive designer...). I decided to have to big wheels at the front to create a visual space where travelers could experience disorientation but being safe protected by those wheels.

Regarding the interior, it evolved to become something more adapted to the experience I wanted. For people who have never drive in their life before, the experience had to be intuitive. Two seats, pedals and steering wheel were, for me, to complicated to approach and learn. It could be even deterrent. So I looked for meanings in "driving" and then decided to take inspiration in bikes, as it is pretty much easy to learn how to ride bicycles. The idea is to offer two saddles with handlebars and controls on the handles like on motorbikes. Like no one knows how to drive, no one is pretending to drive better than the other one. The users can switch the driving role when they want. There is therefore two different roles in the vehicle: a pilot and a co-pilot.
I tried to design the interior around this idea within the exterior package I had. I struggle a bit because of the front wheels which took too much space. It made something too complicated not only visually but also in the way of use of the vehicle.

Being on four average wheels was more coherent: I had enough space in the interior to imagined something better. I focused on architecture, technic details regarding the retractable roof and also every objects that are essential to live with when camping.
________
PHASE 3 - USER SCENARIO
AUTONOMY - Travelers are camping. They discover another way of life, where they depend only on themselves and the vehicle. At the beginning of each day, they choose, with pictures or videos of other travelers, the area of Iceland to visit for the day. This is where the role of tourist guide of the vehicle comes into play.
BRIEFING - Once prepared, travelers leave the camp and head to the chosen area. In autonomous mode, travelers are briefed on the day and the route (difficulty, weather, fording...) thanks to the interactive map. They are warned that they won’t be guided with GPS navigation within the area and are encouraged to look in detail at the map to tore a maximum of information.
GUIDANCE - As soon as the briefing ends and the road is clearer, the passengers take the vehicle in hand by settling at the front, on two saddles. They are guided with GPS navigation to the entrance of the area. They are disoriented by the experience of driving.
EXPLORATION - At the entry of the zone, the GPS guidance stops, as agreed. The challenge is to find the points of interest. The co-pilot must then guide the pilot in the area through the information of the briefing but also through a visual signal (sonar) of nearby points of interest. They also orient themselves with a compass.
DISCOVERY - At different points of interest, travelers can go for a walk or hike to admire and enjoy exceptional environments. They have at their disposal a drone to capture their discoveries. They take with them the interactive map.
DEBRIEFING - After taking advantage of the points of interest, travelers have the opportunity to save their experiences so that they can be exploited both by themselves and by future travelers. In autonomous mode, they take the road to the next campsite.







________
PHASE 4 - FINAL DESIGN


DISORIENTATION THROUGH DRIVING
Since travelers have never driven, the action of driving must be intuitive, hence the inspiration of motorcycles and bicycles. There are several positions that differ depending on the role (driver and co-driver) or according to the desires of each. Since neither person knows how to drive better than the other, two saddles are available, where the two passengers can exchange their roles.


DISORIENTATION THROUGH AUTONOMY
The goal for the couple is to be as independent as possible for 2 weeks, whether in terms of electricity, waste management or autonomy in water. There is a garbage compactor, two expandable water tanks on each side of the vehicle, a photosensitive roof and tent, dry toilets accessible from the rear of the vehicle, an indoor shower, a refrigerator and a kitchen area. Nevertheless, a supply of food and water could be necessary during the trip.










________
PHASE 5 - MOCKUP & PRESENTATION
I build a 3D Model in Blender of the vehicle and then 3D printed some parts and milled others. Thereafter I build a physical mockup of my vehicle with more than 160 pieces (1:10 scale) at school by myself (plus very appreciable extra hands...). Our school participated by giving us a funding.





































_______
Thank you for your time looking at this project. I hope you liked it!
Special thanks to Mike LEVY, Christophe BEAUMONT, Anne CLOIREC, STRATE, Chloé MARICHEZ, Richard SOARES, Florian CONTET, Alice ELSNER, Martin CHATELIER, Adrien BLÉRIOT, Lancelot MALET and many others...




