
Arduino Jumper
Design by YiFeng Lin and Ruixian He
Technical design class under the guidance of Prof. Tom Philipps
Technical design class under the guidance of Prof. Tom Philipps
Die Aufgabe besteht darin, ein Fahrzeug, das durch Arduino kontroliert wird, zu entwickeln, um eine 50cm hoche Treppe überlaufen zu müssen.

Idee entwerfen
Nach der kurzen Disskussion haben wir uns für die Bounce-Methode entschieden, um die 50-cm-Stufe zu erreichen. Im Anfangsstadium gibt es zwei Möglichkeiten der Federkraft, nämlich durch das Biegen des elastischen Materials und die Elastizität der Feder. Nach dem Testen stellten wir fest, dass die Biegefestigkeit nicht gut kontrolliert werden kann und das Gleichgewicht des Rumpfes ebenfalls sehr schwer zu kontrollieren ist. Schließlich wählen Wir die einfachere Art der Federkraft.







Probelm treffen und lösen
Die erste Frage, die aufspringende Feder wird die Bewegung in die zweiten Stufe behindern, um das Problem einfacher zu lösen, haben wir beschlossen, in die zweiten Stufe ,der Körper Einen Winkel drehen und weiter laufen. Die nächste Aufgabe besteht darin, die Struktur, den Motor und die Komponenten nach dieser Idee räumlich anzuordnen. Gleichzeitig werden wir überlegen, wie die Feder gelöst und der Körper gedreht werden soll. Ein ausgewählte Lösung ist, in der ersten Stufe wird die Feder durch Drehungsmotor freigelassen, nach Sprung wird die Struktur natürlich geneigt, während der normalen Bewegung werden B-Räder als Stützstellen verwendet werden kann, A-Räder schweben, nach der Sprung , schweben B-Räder, A- Räder als Vorderrad, der Körper neiget sich nach vorne, die C-Räder wurde immer als Antriebsrad verwendet.
Die nächste Arbeit konzentrierte sich auf die Vorwärtsneigung, die Elastizität der Feder, die Reduzierung der Körpermasse und die Festigkeit. Wir versuchen hohle Struktur, suchen nach leichteren Materialien, Elementen, nach mehreren Versuchen, aduino mega zu schwer ist, substituiert mit aduino Nano, die Batterie auch mit leichtere, bei Struktursanordnung wird sie in der oberen Mitte gestellt , um den Schwerpunkt nach vorne zu neigen. Verwenden wir ein stärkere Feder , dafür werden auch die Dicke und Festigkeit der Karosserieteile verbessert.









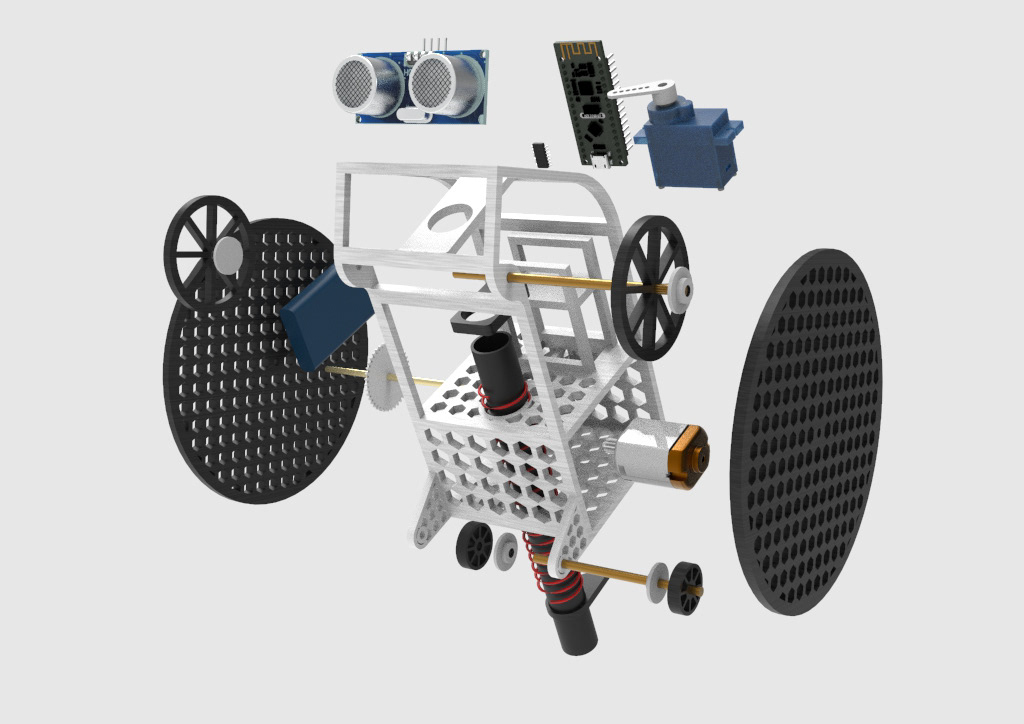
Ergibness
Die endgültige Form ist der Hohlkörper, mit sechs Rädern, der Motor hat einen Antriebsmotor und einen Drehmotor.






Trotz der vielen Versuche führten die Probleme mit Federn und Strukturen immer noch zu keinem Sprung, aber zumindest in der Anordnung der Struktur, und das Konzept der Vorwärtsneigung ist gut. Nach diesem Projekt wurden uns klar, dass es für die Umsetzung des gesamten Projekts von entscheidender Bedeutung ist, möglichst direkt zu denken und Probleme direkt zu lösen: Das zukomplizierte Konzept in der frühen Phase befand sich in der Mitte des Prozesses in einem chaotischen Zustand. Dies wird den Test immer komplizierter machen. Der Punkt ist also, dass wir in der Anfangsphase des Konzepts erkennen, welche Methoden mit unserer Technologie kompatibel sind und die einfachste und direkteste, wodurch sich die Schwierigkeit der Implementierung verringert. Wird die Erfolgsquote erheblich verbessern. Es ist auch wichtig, frühzeitig mit einem einfachen Modell zu testen. Es ist möglich, ein einfaches Simulationsmodell des Konzepts zu testen. Andernfalls können wir auch das Schema frühzeitig ändern.


