Arduino Flea – Technischer Entwurf 2019
Szenario
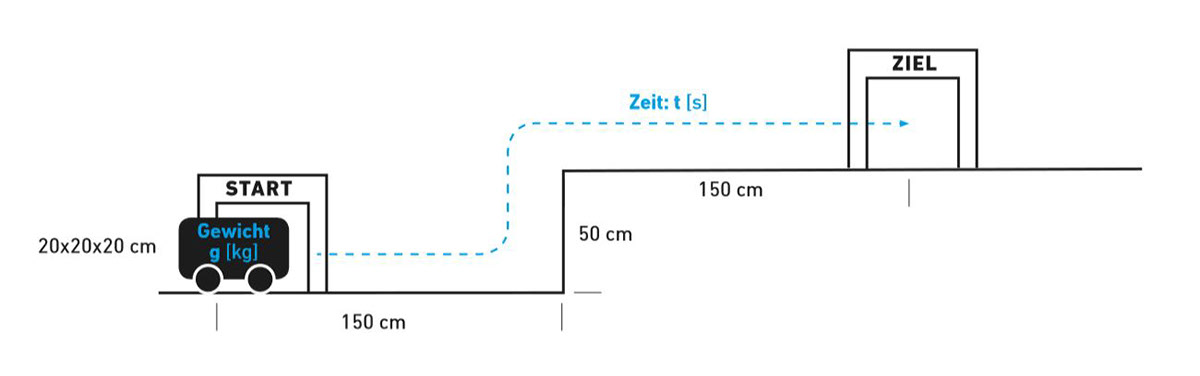
Projektziel ist die Konzeption und Entwicklung eines kleinen Fahrzeuges, welches durch eine programmierte mechanische Transformation in der Lage ist ein Hindernis zu überwinden. Dabei soll der Faktor Zeit/Gewicht minimal sein.
Recherche
Zu Beginn unserer Recherche betrachteten wir Tiere, insbesondere Insekten, welche bekannterweise besonders hohe und weite Sprünge zur Fortbewegung absolvieren. Diese Methoden sollten als Inspiration für unseren Entwurf dienen.
Ein besonders gutes Beispiel ist der Floh, der sich aus dem Stand bis zu 60 cm in die Höhe katapultieren kann.
"Die Schnellbewegung der Sprungbeine gilt als eine der schnellsten Bewegungen im gesamten Tierreich. Um diese zu erreichen, würde die Kontraktionsgeschwindigkeit der Muskeln nicht ausreichen. Daher besitzen Flöhe in ihren Beinen sogenannte Resilinpolster: Resilin ist ein elastisches Protein, welches vor dem Sprung wie ein Bogen gespannt werden kann und dem Floh auf diese Weise sehr weite und hohe Sprünge ermöglicht."
Ebenso Cercopoidea oder Schaumzikaden können trotz ihres sehr geringen Gewichtes bis zu 70 cm weit springen. Im folgenden befassten wir uns also mit unterschiedlichen Spannprinzipien, Federwirkungen und Sprungmechanismen.
Vormodelle – Prinzipien
Für unsere ersten Versuche benutzten wir einen Kohlefaser-Flachstab, den wir mit starkem Faden spannten. Mit Gewicht versehen wurde der Faden zerschnitten und die Versuche gefilmt, um eine Vorstellung der zu erwartenden Flugbahnen zu bekommen.



Die ersten Versuchsreihen wurden jeweils mit einem Kohlefaserstab durchgeführt. Beschwert wurde dieser mit Knete, um ein Gefühl für die Spannkraft der Flachstäbe zu bekommen.



Im Folgenden wurden die Gewichte an den Kohlefasern beidseitig und so gleichmäßig wie möglich befestigt, zusätzlich benutzten wir eine Konstruktion aus 2 Strängen Kohlefaser, um die Spannkraft zu erhöhen.
Diese Versuche zeigten, dass die Auflagefläche des Modells auf dem Boden vergrößert werden musste, da sich die Flachstäbe sonst nicht genügend vom Boden abdrücken konnten.Als Maßnahme wurde provisorisch Holzspatel unten am Aufbau befestigt, um eine größere Auflagefläche zu gewährleisten.
Diese Versuche zeigten, dass die Auflagefläche des Modells auf dem Boden vergrößert werden musste, da sich die Flachstäbe sonst nicht genügend vom Boden abdrücken konnten.Als Maßnahme wurde provisorisch Holzspatel unten am Aufbau befestigt, um eine größere Auflagefläche zu gewährleisten.



In diesen Versuchen zeigten sich deutlich die Problempunkte, die uns im weiteren Ablauf des Entwurfes intensiv beschäftigen werden. Das Auslösen durch das Durchschneiden eines Fadens ist nicht präzise und plötzlich genug, zudem finden die Sprünge noch sehr ungerichtet statt.






Einen weiteren Ansatz verfolgten wir durch die Benutzung von Federn. Diese wurden ebenso mittels eines Fadens festgespannt und der Sprung durch das Zerschneiden ausgelöst. Zunächst erwiesen sich diese Versuche als weniger erfolgreich, da die Sprünge sehr ungerichtet erfolgen und sich mit einfachen Mitteln schwerer steuern lassen.
Entwicklung Auslösemechanismus
Die Auslösung der gespannten Federn soll durch eine Drehbewegung erzeugt werden. Dabei wird eine Öse oben an eine Art Wippe befestigt. Durch das Kippen der Wippe rutscht die Öse heraus und kann so besonders schnell auslösen. Zunächst versuchten wir dies wieder mittels Faden und einer händischen Auslösung.


Zum Testen wurde eine zusätzliche Schiene eingebaut, die beim Rausziehen das Kippen der Wippe verursacht. Dieser Ansatz wurde zunächst verworfen, da dies eine weitere Komponente und auch größere Reibungskräfte bedeuten würden.
Danach entwickelten wir die technische Umsetzung des Auslösemechanismus. Um die Komponenten so minimal wie möglich zu halten, benutzten wir lediglich einen Servomotor und testeten, ob dieser die Öse schnell genug vom Spannungszustand ausgehend auslösen kann. Dies funktionierte ohne die weiteren Komponenten soweit gut. Als nächstes musste getestet werden, ob der Servomotor in dieser Größe und Ausführung genügt, um die Spannkraft der Kohlefaserstäbe zu halten.
Prototyp




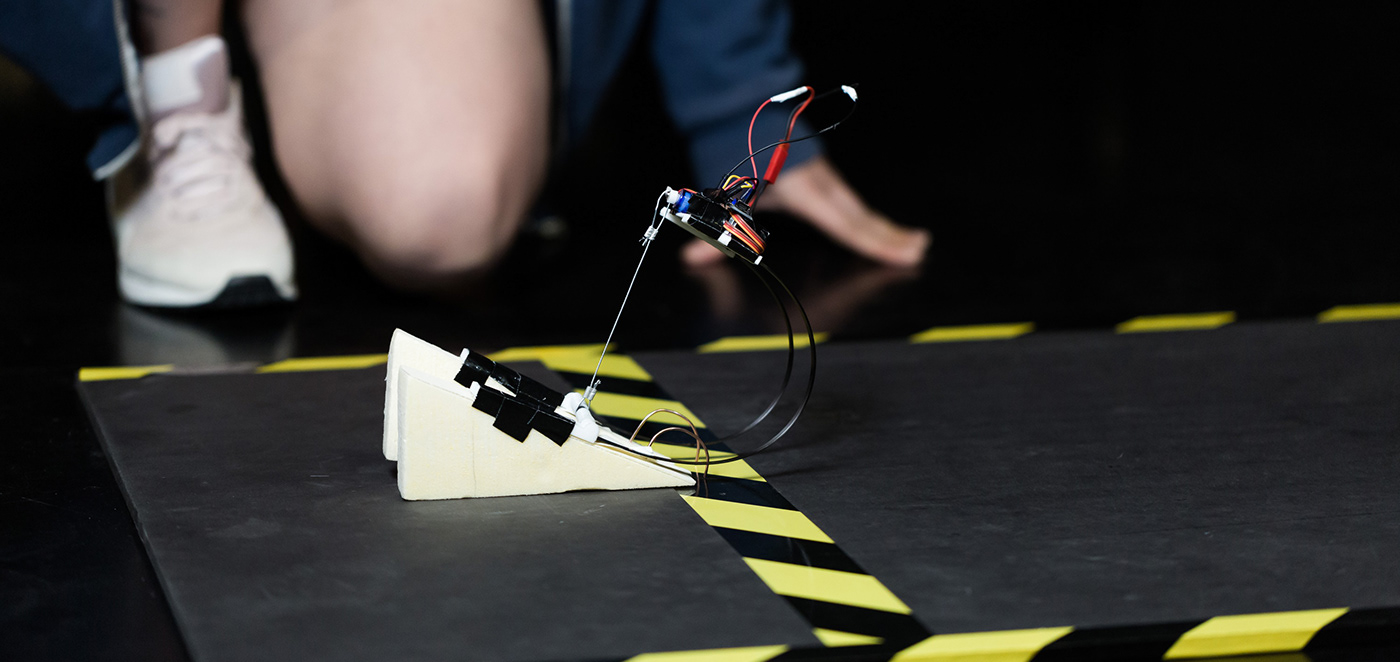
Im nächsten Versuch wurden der Akku, ein arduino nano sowie der Servomotor an unser Modell angebracht, um die Flugbahn und die Stabilität des Servos ohne eine händische Auslösung zu testen.
(Gewicht liegt hier bei ca. 79 g)
Anpassung und Optimierung
In den ersten Versuchen mit allen angeschlossenen Komponenten fiel auf, dass der Mechanismus relativ hoch springen konnte, aber nicht sehr weit. Um dem entgegenzuwirken, wurden unter die Auflagefläche zunächst Keile in verschiedenen Winkeln befestigt, um sich so Versuch für Versuch an den richtigen Winkel und die richtige Aufbaut zu nähern.
Ergebnis



Design von Denise Genctürk und Felicia Burger
Ein technischer Entwurf des Fachbereichs Gestaltung der Hochschule Darmstadt.
Betreuung: Prof. Tom Philipps

