Johannes Pfaff, David Blumberg
Technical design class
Under the guidance of Prof. Tom Philipps

arduino wall climber
This course required building a vehicle based around an Arduino micro controller that has to overcome a 50 cm high step. To get there, it already has to put 150 cm in the flat behind it, repeated at the top of the step.
We quickly thought through multiple ideas and sketches of how to overcome the hurdle before concentrating on an idea that would let us solve it with a pretty minimalistic amount of components. The setup seems easy, but it would need quite some balancing, as we discovered soon.

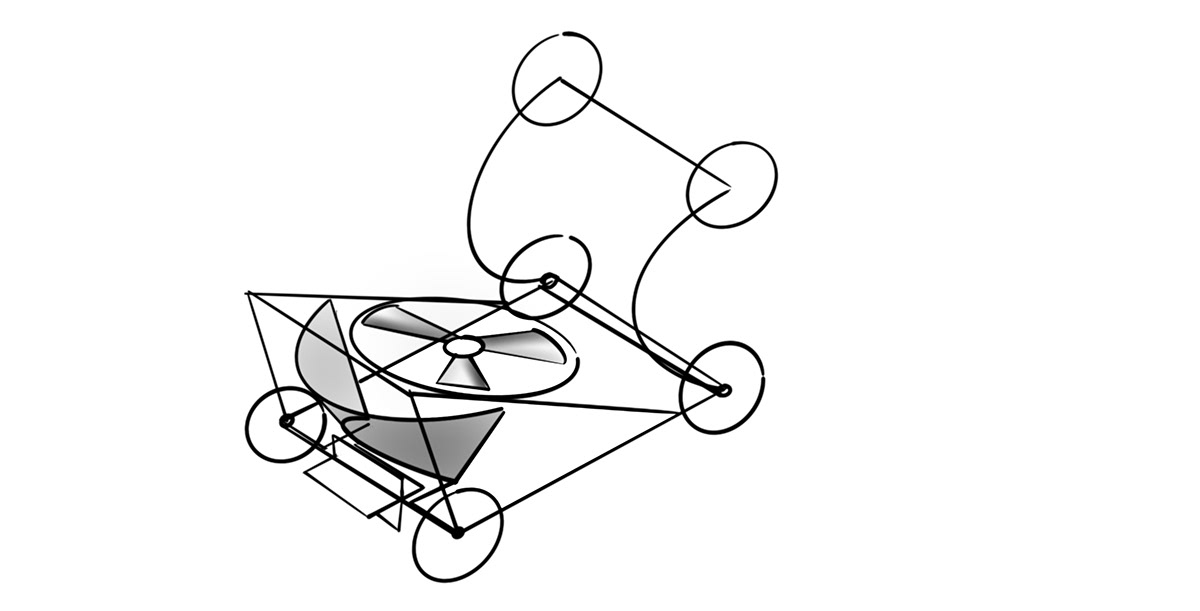

Our idea was to combine a simple geometry with a single propeller. Through a recess in the front geometry, it is possible to "climb" over the edge with one single propeller. Since the first attempts repeatedly tipped left or right, we installed fins that were controlled via a servo. Although this allowed us to steer against the wall, it was ultimately too complex for our goal setting of a simple as possible companion.


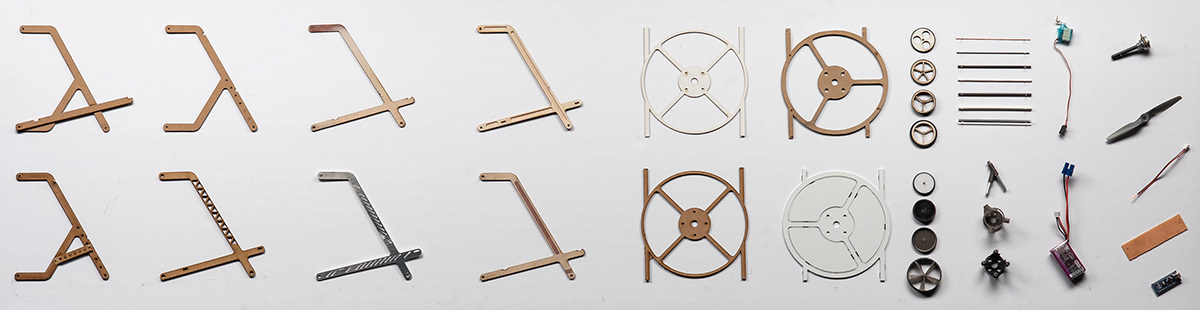
Another advantage of the single propeller was the simple code. Since we did not use any sensors, it was possible to write the code purely time-based. Even if this allows a less complex code, the model making became all the more complicated. Due to the many attempts and changes, it was necessary to build a variety of models.
















