One of my assignments at Ethicon was to structure a handle and use case for an endosurgical stapling device that performs two sets of functions:
1. Clamp tissue and lock in place
2. Arm (enable) staple mechanism and fire (close staples)
1. Clamp tissue and lock in place
2. Arm (enable) staple mechanism and fire (close staples)

We knew from previous user research that Physician's Assistants often move the cables that connect these handles to their surgery ends out of the surgeons' way, so I started sketching control handles that afford multiple hand positions.
I also started thinking about ways to physically and procedurally separate the functions of the device, to prevent misfire.
I also started thinking about ways to physically and procedurally separate the functions of the device, to prevent misfire.

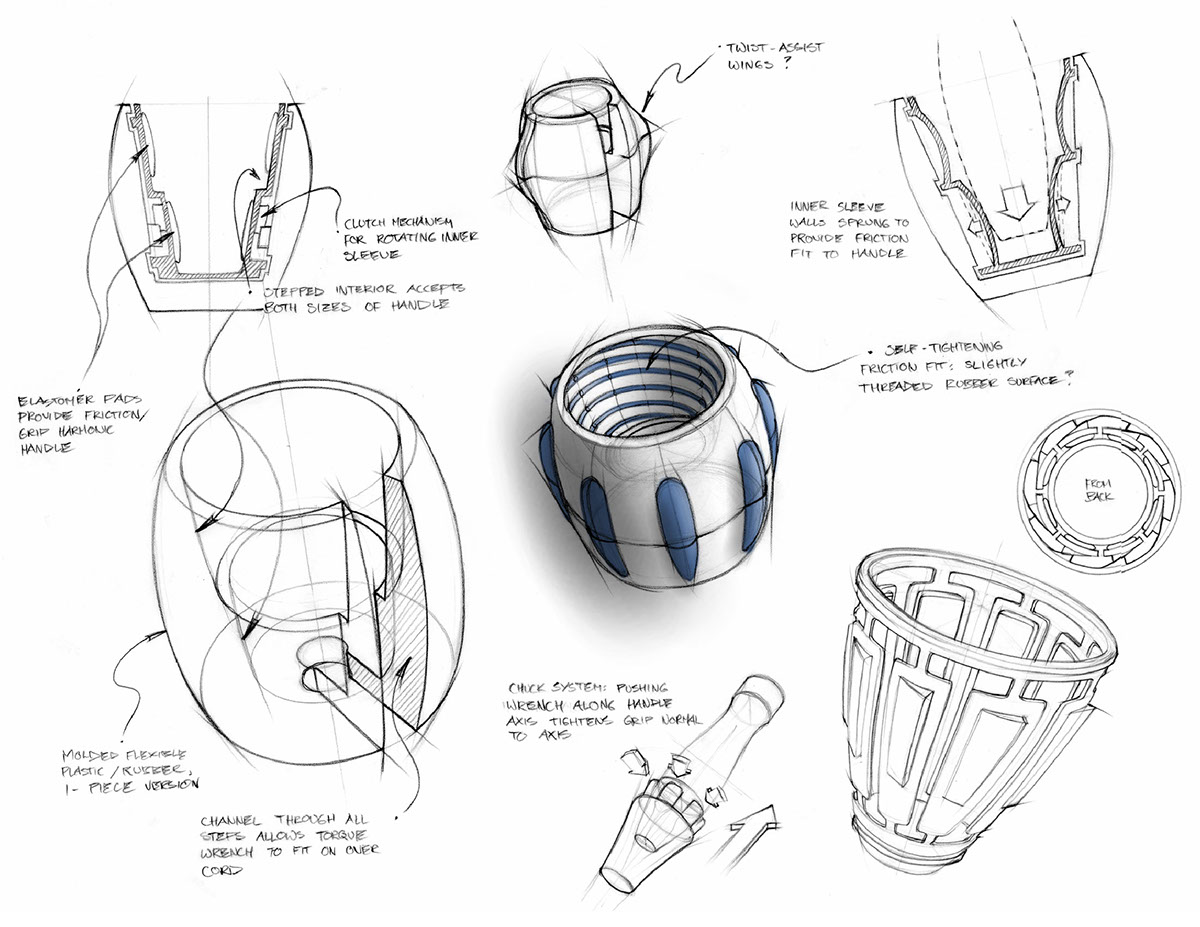
I researched Human Factors standards to determine the optimal size for the knobs, based on the different torques required to complete the clamping and firing actions.
My design recommendation used a smaller control knob to clamp the device, because clamping required lower torque. Pressing the small knob into the handle locked the clamp and armed the device for stapling, and got the small handle out of the way. The larger knob was then used to close the staples.
My design recommendation used a smaller control knob to clamp the device, because clamping required lower torque. Pressing the small knob into the handle locked the clamp and armed the device for stapling, and got the small handle out of the way. The larger knob was then used to close the staples.

I sketched on components for a number of devices, including simplified torque wrenches (for attaching one component of a device to another before surgery) and thumb triggers for a cutting device.

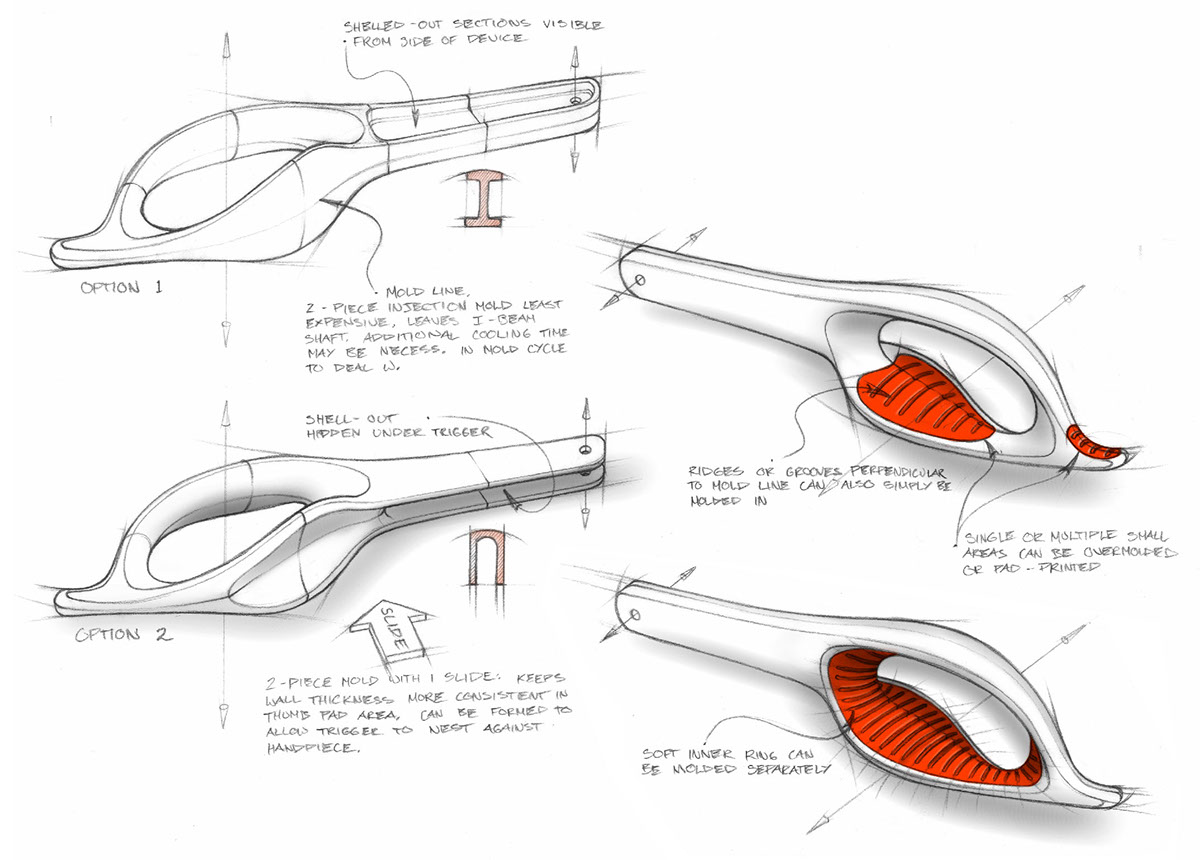
Ethicon also allowed me to do some very rapid, powerful prototyping for tactile controls. This device required a dual-stage trigger; one trigger that could initiate "low" and "high" power levels.

Using Alias and Solidworks, I designed a set of removable trigger mechanisms to mock up various strategies. The winner used a small magnet and a dome switch to create two sequential "clicks." A set screw provided adjustment of the strength of the second "click" so surgeons could test and provide feedback on the feel of the trigger.
An in-house Objet poly-jet 3D printer gave me the high resolution and part strength necessary for these detailed, "looks-like, feels-like" prototypes.
An in-house Objet poly-jet 3D printer gave me the high resolution and part strength necessary for these detailed, "looks-like, feels-like" prototypes.



