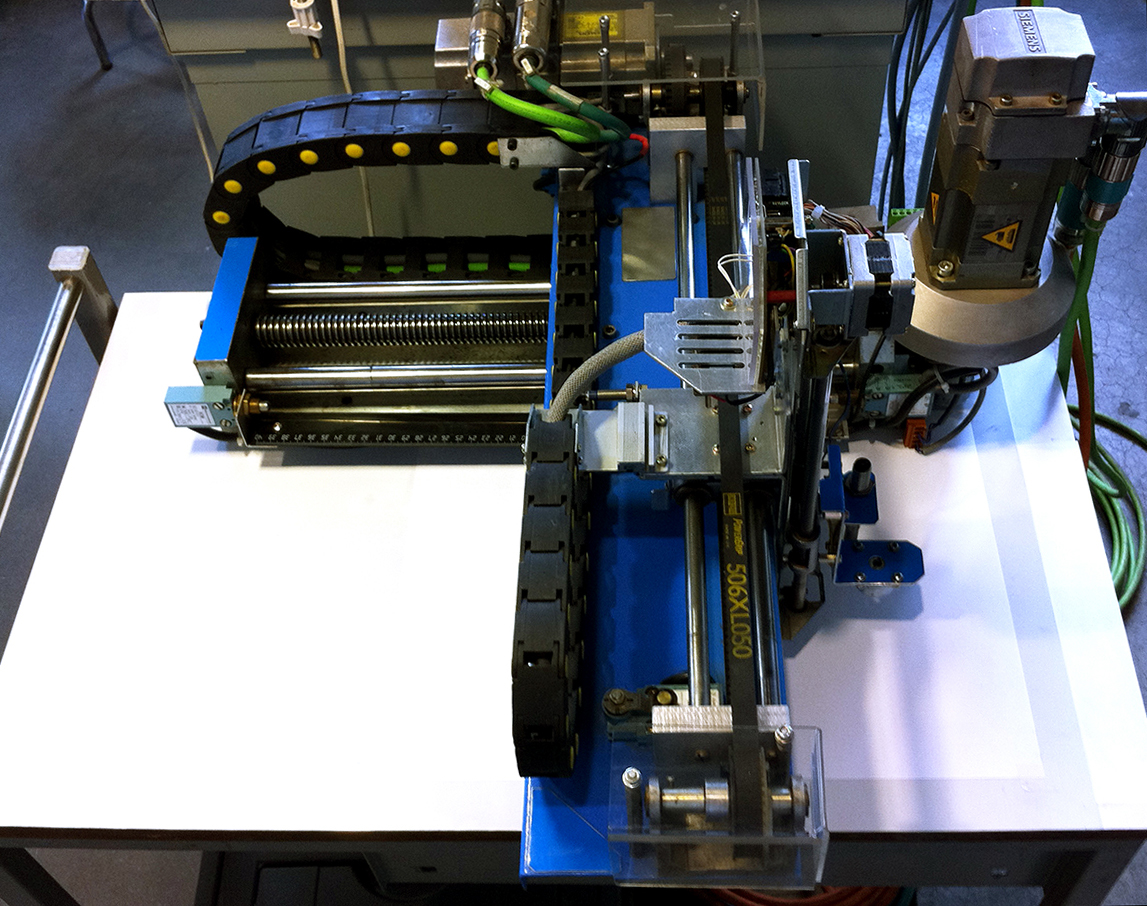
Training model of 3-Axis Cartesian robot based on Siemens Industrial Automation and Drive Technologies. Manipulator was created as my final thesis at university.
Equipment:
PLC: Simatic S7 315-2DP
Positioning module: FM357-2
X-Y Axis Drives: Simodrive 611U + 1FK7032 Servomotors
Z Axis: DIY Stepper motor controller (L297+L298)
Networks: Profibus DP, MPI, AS-i (DP Link 20E)
HMI: Simatic OP17
Positioning module: FM357-2
X-Y Axis Drives: Simodrive 611U + 1FK7032 Servomotors
Z Axis: DIY Stepper motor controller (L297+L298)
Networks: Profibus DP, MPI, AS-i (DP Link 20E)
HMI: Simatic OP17






Video of operation:
