

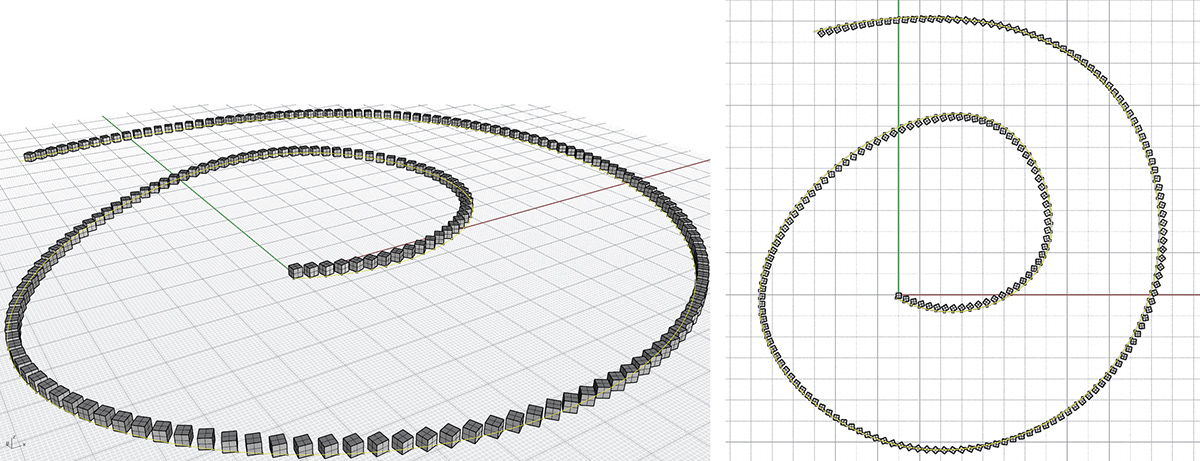
2D/3D GEOMETRY STUDIES
import rhinoscriptsyntax as rs
import math
import math
#Defining dimensions of the box
pt1=(0,0,0)
pt2=(1,0,0)
pt3=(1,1,0)
pt4=(0,1,0)
pt5=(0,0,1)
pt6=(1,0,1)
pt7=(1,1,1)
pt8=(0,1,1)
pt1=(0,0,0)
pt2=(1,0,0)
pt3=(1,1,0)
pt4=(0,1,0)
pt5=(0,0,1)
pt6=(1,0,1)
pt7=(1,1,1)
pt8=(0,1,1)
corners=(pt1,pt2,pt3,pt4,pt5,pt6,pt7,pt8)
#Defing the ammount of points the curve is broken into
def main():
curve_id = rs.GetObject("Select a curve to sample", 4, True, True)
if not curve_id: return
rs.EnableRedraw(False)
t = 0
while t<=1.0:
addpointat_r1_parameter(curve_id,t)
t=0.005
rs.EnableRedraw(True)
def main():
curve_id = rs.GetObject("Select a curve to sample", 4, True, True)
if not curve_id: return
rs.EnableRedraw(False)
t = 0
while t<=1.0:
addpointat_r1_parameter(curve_id,t)
t=0.005
rs.EnableRedraw(True)
#Defing curve and location of boxes on curve
def addpointat_r1_parameter(curve_id, parameter):
domain = rs.CurveDomain(curve_id)
r1_param = domain[0] + parameter*(domain[1]-domain[0])
r3point = rs.EvaluateCurve(curve_id, r1_param)
if r3point:
point_id = rs.AddPoint(r3point)
box = rs.AddBox(corners)
a = rs.MoveObject(box,point_id)
rs.RotateObjects(a,point_id,r1_param)
def addpointat_r1_parameter(curve_id, parameter):
domain = rs.CurveDomain(curve_id)
r1_param = domain[0] + parameter*(domain[1]-domain[0])
r3point = rs.EvaluateCurve(curve_id, r1_param)
if r3point:
point_id = rs.AddPoint(r3point)
box = rs.AddBox(corners)
a = rs.MoveObject(box,point_id)
rs.RotateObjects(a,point_id,r1_param)
rs.ScaleObjects(a,point_id,[3,3,3])
#execute main() function
main()
main()
An extended version of the code above, with the addition of classes in order to call and embed functions.
import rhinoscriptsyntax as rs
import math
class CrvDiv:
def __init__ (self, crv1, NumDiv, SclObj):
self.crv1 = crv1
self.NumDiv = NumDiv
self.SclObj = SclObj
self.pt1=(0,0,0)
self.pt2=(1,0,0)
self.pt3=(1,1,0)
self.pt4=(0,1,0)
self.pt5=(0,0,1)
self.pt6=(1,0,1)
self.pt7=(1,1,1)
self.pt8=(0,1,1)
self.corners=(self.pt1,self.pt2,self.pt3,self.pt4,self.pt5,self.pt6,self.pt7,self.pt8)
#Add, Move Box to Line, and Scale Based on User Input
def DivideCrv(self):
PtList1 = rs.DivideCurve(self.crv1, self.NumDiv, True, True)
for i in range (len(PtList1)):
box = rs.AddBox(self.corners)
rs.MoveObject(box,PtList1[i])
print(PtList1[i])
#rs.RotateObjects(box,PtList1,20)
rs.ScaleObjects(box,PtList1[i], [self.SclObj, self.SclObj, self.SclObj])
#User Select Curve, Divide Curve by User Input, and Scale Boxes Based on User Input
SelectCrv1 = rs.GetObject("Select a Curve",4)
SelectDiv = rs.GetReal("Input Number of Divisions on Curve", None, 3, None)
SelectScl = rs.GetReal("Input Scale of Object",None,1,None)
obj01 = CrvDiv(SelectCrv1,SelectDiv, SelectScl)
obj01.DivideCrv()
import math
class CrvDiv:
def __init__ (self, crv1, NumDiv, SclObj):
self.crv1 = crv1
self.NumDiv = NumDiv
self.SclObj = SclObj
self.pt1=(0,0,0)
self.pt2=(1,0,0)
self.pt3=(1,1,0)
self.pt4=(0,1,0)
self.pt5=(0,0,1)
self.pt6=(1,0,1)
self.pt7=(1,1,1)
self.pt8=(0,1,1)
self.corners=(self.pt1,self.pt2,self.pt3,self.pt4,self.pt5,self.pt6,self.pt7,self.pt8)
#Add, Move Box to Line, and Scale Based on User Input
def DivideCrv(self):
PtList1 = rs.DivideCurve(self.crv1, self.NumDiv, True, True)
for i in range (len(PtList1)):
box = rs.AddBox(self.corners)
rs.MoveObject(box,PtList1[i])
print(PtList1[i])
#rs.RotateObjects(box,PtList1,20)
rs.ScaleObjects(box,PtList1[i], [self.SclObj, self.SclObj, self.SclObj])
#User Select Curve, Divide Curve by User Input, and Scale Boxes Based on User Input
SelectCrv1 = rs.GetObject("Select a Curve",4)
SelectDiv = rs.GetReal("Input Number of Divisions on Curve", None, 3, None)
SelectScl = rs.GetReal("Input Scale of Object",None,1,None)
obj01 = CrvDiv(SelectCrv1,SelectDiv, SelectScl)
obj01.DivideCrv()

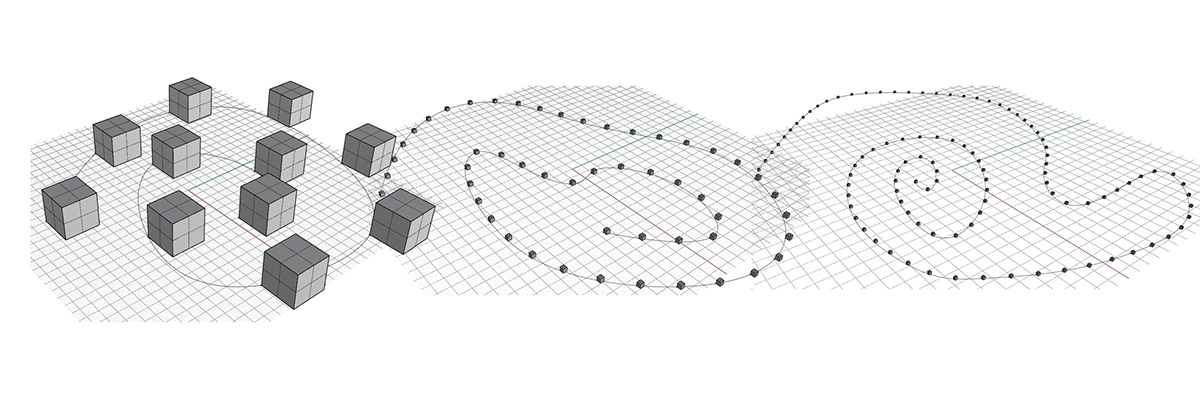
Creating a group of objects whose heights change based upon a defined Cosine curve. Where the objects below the x,y plane are deleted. Using user defined amounts and sizes.
import math
import rhinoscriptsyntax as rs
import rhinoscriptsyntax as rs
#Define box
corners=([0,0,0],[1,0,0],[1,1,0],[0,1,0],[0,0,1],[1,0,1],[1,1,1],[0,1,1])
corners=([0,0,0],[1,0,0],[1,1,0],[0,1,0],[0,0,1],[1,0,1],[1,1,1],[0,1,1])
#Range Parameters
dblA = 0.
dblB = 100.
dblStep = 4.
dblA = 0.
dblB = 100.
dblStep = 4.
#Cosine function to allow cubes to start at maximum altitude and decrease
for x in rs.frange(dblA,dblB,dblStep):
for y in rs.frange (dblA,dblB,dblStep):
box=rs.AddBox (corners)
z = 50*math.cos(math.radians(x+y))
rs.ScaleObject(box,[0,0,0],[4,4,z])
for x in rs.frange(dblA,dblB,dblStep):
for y in rs.frange (dblA,dblB,dblStep):
box=rs.AddBox (corners)
z = 50*math.cos(math.radians(x+y))
rs.ScaleObject(box,[0,0,0],[4,4,z])
#rotate around origin point to create "pyramid" shape
quad1= rs.MoveObject(box,[x,y,0])
quad2 = rs.RotateObject(quad1,[0,0,0],90,None,True)
quad3 = rs.RotateObject(quad2,[0,0,0],90,None,True)
quad4 = rs.RotateObject(quad3,[0,0,0],90,None,True)
quad1= rs.MoveObject(box,[x,y,0])
quad2 = rs.RotateObject(quad1,[0,0,0],90,None,True)
quad3 = rs.RotateObject(quad2,[0,0,0],90,None,True)
quad4 = rs.RotateObject(quad3,[0,0,0],90,None,True)
#Delete every object below z = 0
if z <= 0:
rs.DeleteObjects([box,quad2,quad3,quad4])
if z <= 0:
rs.DeleteObjects([box,quad2,quad3,quad4])
import math
import rhinoscriptsyntax as rs
class Pyramid:
#Define box
def __init__ (self, dblA, dblB, dblStep):
self.dblA = dblA
self.dblB = dblB
self.dblStep = dblStep
self.pt1=(0,0,0)
self.pt2=(1,0,0)
self.pt3=(1,1,0)
self.pt4=(0,1,0)
self.pt5=(0,0,1)
self.pt6=(1,0,1)
self.pt7=(1,1,1)
self.pt8=(0,1,1)
self.corners=(self.pt1,self.pt2,self.pt3,self.pt4,self.pt5,self.pt6,self.pt7,self.pt8)
def CosineScale (self):
#Cosine function to allow cubes to start at maximum altitude and decrease
for x in rs.frange(self.dblA,self.dblB,self.dblStep):
for y in rs.frange (self.dblA,self.dblB,self.dblStep):
box=rs.AddBox (self.corners)
z = ((self.dblB/2)*math.cos(math.radians(x+y)))
rs.ScaleObject(box,[0,0,0],[self.dblStep,self.dblStep,z])
#rotate around origin point to create "pyramid" shape
quad1= rs.MoveObject(box,[x,y,0])
quad2 = rs.RotateObject(quad1,[0,0,0],90,None,True)
quad3 = rs.RotateObject(quad2,[0,0,0],90,None,True)
quad4 = rs.RotateObject(quad3,[0,0,0],90,None,True)
#Delete every object below z = 0
import rhinoscriptsyntax as rs
class Pyramid:
#Define box
def __init__ (self, dblA, dblB, dblStep):
self.dblA = dblA
self.dblB = dblB
self.dblStep = dblStep
self.pt1=(0,0,0)
self.pt2=(1,0,0)
self.pt3=(1,1,0)
self.pt4=(0,1,0)
self.pt5=(0,0,1)
self.pt6=(1,0,1)
self.pt7=(1,1,1)
self.pt8=(0,1,1)
self.corners=(self.pt1,self.pt2,self.pt3,self.pt4,self.pt5,self.pt6,self.pt7,self.pt8)
def CosineScale (self):
#Cosine function to allow cubes to start at maximum altitude and decrease
for x in rs.frange(self.dblA,self.dblB,self.dblStep):
for y in rs.frange (self.dblA,self.dblB,self.dblStep):
box=rs.AddBox (self.corners)
z = ((self.dblB/2)*math.cos(math.radians(x+y)))
rs.ScaleObject(box,[0,0,0],[self.dblStep,self.dblStep,z])
#rotate around origin point to create "pyramid" shape
quad1= rs.MoveObject(box,[x,y,0])
quad2 = rs.RotateObject(quad1,[0,0,0],90,None,True)
quad3 = rs.RotateObject(quad2,[0,0,0],90,None,True)
quad4 = rs.RotateObject(quad3,[0,0,0],90,None,True)
#Delete every object below z = 0
if z <= 0:
rs.DeleteObjects([box,quad2,quad3,quad4])
#Range Parameters With Defaults of a Height of 100 and a Scale of 4
InputAmmount = rs.GetReal("Input Height to be divided in Half", 100, 2, None)
InputScale = rs.GetReal("Input Scale of box", 4, 1, None)
obj01 = Pyramid(0,InputAmmount,InputScale)
obj01.CosineScale()
RECURSION
Random growth patterns, at random origin points. These patterns grow to a set amount determined by the code, and then go through a recursion process a set number of times.
import rhinoscriptsyntax as rs
import random
import math
import random
import math
rs.EnableRedraw(False)
class Rec:
def __init__(self, _border):
self.border =_border
def __init__(self, _border):
self.border =_border
def outline(self):
self.pt1 = [0,0,0]
self.pt2 = [self.border,0,0]
self.pt3 = [self.border,self.border,0]
self.pt4 = [0,self.border,0]
rs.AddCurve((self.pt1,self.pt2,self.pt3,self.pt4,self.pt1),1)
self.pt1 = [0,0,0]
self.pt2 = [self.border,0,0]
self.pt3 = [self.border,self.border,0]
self.pt4 = [0,self.border,0]
rs.AddCurve((self.pt1,self.pt2,self.pt3,self.pt4,self.pt1),1)
obj1 = Rec(120)
obj1.outline()
obj1.outline()
CircList = []
def placePt(x_range,y_range,z_range):
x = random.uniform(0,x_range)
y = random.uniform(0,y_range)
z = random.uniform(0,z_range)
pt = [x,y,z]
return pt
x = random.uniform(0,x_range)
y = random.uniform(0,y_range)
z = random.uniform(0,z_range)
pt = [x,y,z]
return pt
for j in range(0,10):
ZeroX = random.uniform(j,120)
ZeroY = random.uniform (j,120)
ptZero = [ZeroX,ZeroY,0]
pts = []
pts.append(ptZero)
circleZero = rs.AddCircle(ptZero,.5)
for i in range(0,(random.randint(10,100))):
pt = rs.AddPoint(placePt(100,100,0))
index = rs.PointArrayClosestPoint(pts,pt)
cp = pts[index]
vect = rs.VectorCreate(cp,pt)
unitVect = rs.VectorUnitize(vect)
subVect = vect - unitVect
newPt = rs.MoveObject(pt,subVect)
Ptcoor = rs.PointCoordinates(newPt)
NewCirc = rs.AddCircle(newPt,.5)
pts.append(newPt)
CircList.append(NewCirc)
ZeroX = random.uniform(j,120)
ZeroY = random.uniform (j,120)
ptZero = [ZeroX,ZeroY,0]
pts = []
pts.append(ptZero)
circleZero = rs.AddCircle(ptZero,.5)
for i in range(0,(random.randint(10,100))):
pt = rs.AddPoint(placePt(100,100,0))
index = rs.PointArrayClosestPoint(pts,pt)
cp = pts[index]
vect = rs.VectorCreate(cp,pt)
unitVect = rs.VectorUnitize(vect)
subVect = vect - unitVect
newPt = rs.MoveObject(pt,subVect)
Ptcoor = rs.PointCoordinates(newPt)
NewCirc = rs.AddCircle(newPt,.5)
pts.append(newPt)
CircList.append(NewCirc)
def RecScale(num,CircList):
if (num <=1):
return 1
else:
a1 = rs.ScaleObject(CircList,Ptcoor,[ 10*(1/num),10*(1/num),0], True )
return RecScale(num-1,CircList)
if (num <=1):
return 1
else:
a1 = rs.ScaleObject(CircList,Ptcoor,[ 10*(1/num),10*(1/num),0], True )
return RecScale(num-1,CircList)
num = 10
for k in range(0,10):
RecScale(num, CircList)
RecScale(num, CircList)
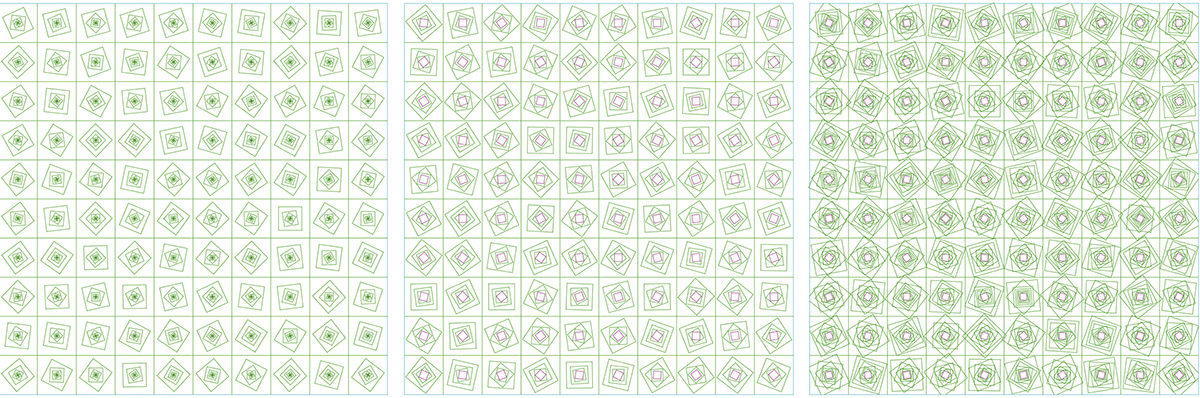
A square grid plotted and ran through a recursion definition, that says to scale down and rotate by a random angle around the center point of each square. Below the variations show different rotation ranges and differing amounts of recursions.
import rhinoscriptsyntax as rs
import math
import random
class Rec:
def __init__(self, _num,_i, _j, _border):
self.i = _i
self.j = _j
self.num = _num
self.border =_border
self.plane = rs.WorldXYPlane()
self.a = rs.AddRectangle(self.plane,12,12)
self.a1 = rs.MoveObject(self.a,[self.i,self.j,0])
self.Cent = rs.CurveAreaCentroid(self.a1)
self.CentPt = rs.AddPoint(self.Cent[0])
import math
import random
class Rec:
def __init__(self, _num,_i, _j, _border):
self.i = _i
self.j = _j
self.num = _num
self.border =_border
self.plane = rs.WorldXYPlane()
self.a = rs.AddRectangle(self.plane,12,12)
self.a1 = rs.MoveObject(self.a,[self.i,self.j,0])
self.Cent = rs.CurveAreaCentroid(self.a1)
self.CentPt = rs.AddPoint(self.Cent[0])
def outline(self):
self.pt1 = [0,0,0]
self.pt2 = [self.border,0,0]
self.pt3 = [self.border,self.border,0]
self.pt4 = [0,self.border,0]
rs.AddCurve((self.pt1,self.pt2,self.pt3,self.pt4,self.pt1),1)
self.pt1 = [0,0,0]
self.pt2 = [self.border,0,0]
self.pt3 = [self.border,self.border,0]
self.pt4 = [0,self.border,0]
rs.AddCurve((self.pt1,self.pt2,self.pt3,self.pt4,self.pt1),1)
def RecScale(self, num):
if (num <=1):
return 1
else:
self.a1 = rs.ScaleObject(self.a1,self.CentPt,[(1/self.num)*2,(1/self.num)*2,0], True )
Rota1 = rs.RotateObject(self.a1,self.CentPt,random.randint(1,360))
return self.RecScale(num-.5)
num=3
for i in rs.frange (0,116,12):
for j in rs.frange (0,116,12):
obj1 = Rec(num,i,j, 120)
obj1.RecScale(num)
for j in rs.frange (0,116,12):
obj1 = Rec(num,i,j, 120)
obj1.RecScale(num)
obj1.outline()
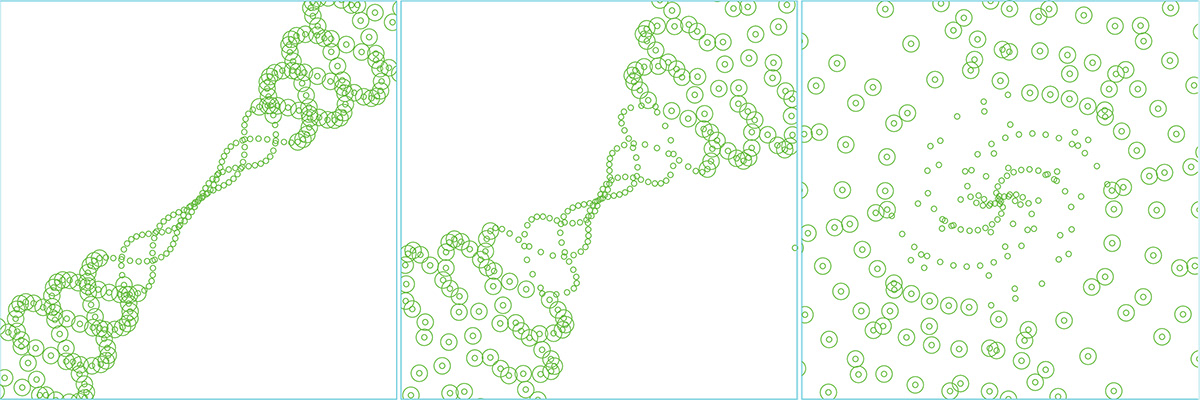
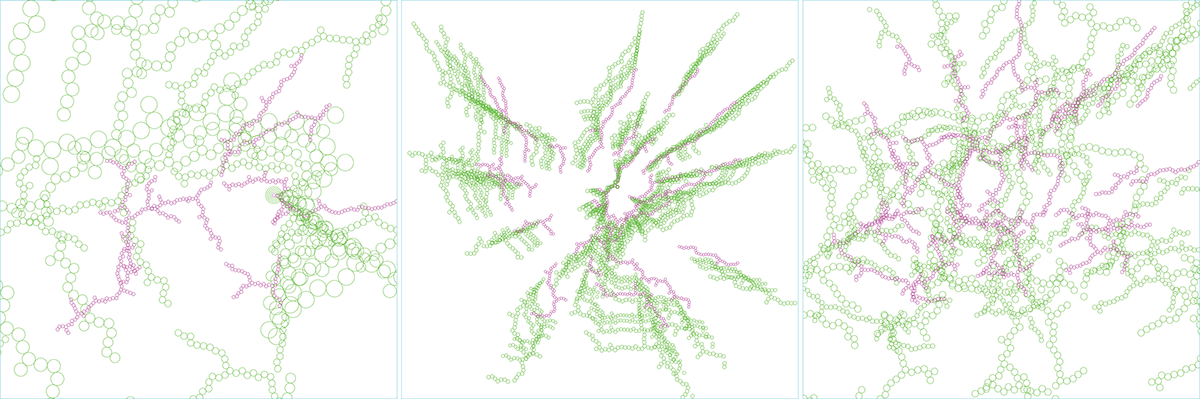
A plot of circles rotated by a sine curve, cosine curve, and tangent curve. The curves are then run through a user determined ammount of recursion loops. The premise of this experiment was to apply a recursive function on certain areas of plotted objects.
import rhinoscriptsyntax as rs
import math
import random
rs.EnableRedraw(False)
import math
import random
rs.EnableRedraw(False)
class Base:
def __init__(self,i,Mfun,num,Angle):
self.i = i
self.Mfun = Mfun
self.num = num
self.Angle = Angle
self.RoCirc = None
self.Ro2Circ = None
self.Center = None
self.Center2 = None
self.pt1 = (-self.i/2,-self.i/2,0)
self.pt2 = (self.i/2,-self.i/2,0)
self.pt3 = (self.i/2,self.i/2,0)
self.pt4 = (-self.i/2,self.i/2,0)
self.Border = rs.AddCurve([self.pt1,self.pt2,self.pt3,self.pt4,self.pt1],1)
self.PtList = []
self.RecList = []
self.CircList = []
self.CoordList = []
self.Circle = rs.AddCircle([0,0,0],40)
def Crv (self):
for r in range (0,150):
Circ = rs.AddCircle((0,0,0),1)
rs.MoveObject(Circ, (r/2,r/2,0))
if (self.Mfun == 1):
x = math.sin(2*r)
elif (self.Mfun == 2):
x = math.cos(2*r)
elif (self.Mfun == 3):
x = math.tan(r)
self.RoCirc = rs.RotateObject(Circ,(0,0,0),self.Angle*x,None)
self.Center = rs.CircleCenterPoint(self.RoCirc)
CentPoint = rs.AddPoint(self.Center)
self.Ro2Circ = rs.RotateObject(self.RoCirc,(0,0,0),180,None,True)
self.Center2 = rs.CircleCenterPoint(self.Ro2Circ)
CentPoint2 = rs.AddPoint(self.Center2)
self.CircList.append([self.RoCirc,self.Ro2Circ])
self.PtList.append(CentPoint)
self.PtList.append(CentPoint2)
Del1 = rs.PointInPlanarClosedCurve(CentPoint,self.Circle)
Del2 = rs.PointInPlanarClosedCurve(CentPoint2,self.Circle)
self.RecList.append([Del1,Del2])
self.CoordList.append([self.Center,self.Center2])
if (Del1 == 0):
self.Recursion(num)
rs.DeleteObject(self.Circle)
def __init__(self,i,Mfun,num,Angle):
self.i = i
self.Mfun = Mfun
self.num = num
self.Angle = Angle
self.RoCirc = None
self.Ro2Circ = None
self.Center = None
self.Center2 = None
self.pt1 = (-self.i/2,-self.i/2,0)
self.pt2 = (self.i/2,-self.i/2,0)
self.pt3 = (self.i/2,self.i/2,0)
self.pt4 = (-self.i/2,self.i/2,0)
self.Border = rs.AddCurve([self.pt1,self.pt2,self.pt3,self.pt4,self.pt1],1)
self.PtList = []
self.RecList = []
self.CircList = []
self.CoordList = []
self.Circle = rs.AddCircle([0,0,0],40)
def Crv (self):
for r in range (0,150):
Circ = rs.AddCircle((0,0,0),1)
rs.MoveObject(Circ, (r/2,r/2,0))
if (self.Mfun == 1):
x = math.sin(2*r)
elif (self.Mfun == 2):
x = math.cos(2*r)
elif (self.Mfun == 3):
x = math.tan(r)
self.RoCirc = rs.RotateObject(Circ,(0,0,0),self.Angle*x,None)
self.Center = rs.CircleCenterPoint(self.RoCirc)
CentPoint = rs.AddPoint(self.Center)
self.Ro2Circ = rs.RotateObject(self.RoCirc,(0,0,0),180,None,True)
self.Center2 = rs.CircleCenterPoint(self.Ro2Circ)
CentPoint2 = rs.AddPoint(self.Center2)
self.CircList.append([self.RoCirc,self.Ro2Circ])
self.PtList.append(CentPoint)
self.PtList.append(CentPoint2)
Del1 = rs.PointInPlanarClosedCurve(CentPoint,self.Circle)
Del2 = rs.PointInPlanarClosedCurve(CentPoint2,self.Circle)
self.RecList.append([Del1,Del2])
self.CoordList.append([self.Center,self.Center2])
if (Del1 == 0):
self.Recursion(num)
rs.DeleteObject(self.Circle)
def Recursion(self, num):
if (num <= 1):
return 1
else:
rs.ScaleObjects(self.RoCirc, self.Center ,(self.num,self.num,0), True)
rs.ScaleObjects(self.Ro2Circ, self.Center2 ,(self.num,self.num,0), True)
return self.Recursion (num - 1)
Mfun = rs.GetInteger("Choose 1 for sine curve. Choose 2 for cosine curve. Choose 3 for tangent curve.")
Angle = rs.GetInteger("Enter angle of rotation",15,1,180)
num = rs.GetInteger("Enter number of recursions",3,2,5)
if (num <= 1):
return 1
else:
rs.ScaleObjects(self.RoCirc, self.Center ,(self.num,self.num,0), True)
rs.ScaleObjects(self.Ro2Circ, self.Center2 ,(self.num,self.num,0), True)
return self.Recursion (num - 1)
Mfun = rs.GetInteger("Choose 1 for sine curve. Choose 2 for cosine curve. Choose 3 for tangent curve.")
Angle = rs.GetInteger("Enter angle of rotation",15,1,180)
num = rs.GetInteger("Enter number of recursions",3,2,5)
obj01 = Base(144, Mfun,num, Angle)
obj01.Crv()
obj01.Recursion(num)
obj01.Crv()
obj01.Recursion(num)

A generation of random sided shapes at random sizes. These generated shapes are then put through a recursion process, of which the user determined the amount of recursions. The user can input the interger value to determine the degree of the curve to determine its smoothness.
import rhinoscriptsyntax as rs
import math
import random
import math
import random
rs.EnableRedraw(False)
class Rec:
def __init__(self,i,_num, putin):
self.i = i
self.num = _num
self.putin = putin
self.Ngon = None
self.PtList = None
self.pt1 = (-self.i/2,-self.i/2,0)
self.pt2 = (self.i/2,-self.i/2,0)
self.pt3 = (self.i/2,self.i/2,0)
self.pt4 = (-self.i/2,self.i/2,0)
self.Border = rs.AddCurve([self.pt1,self.pt2,self.pt3,self.pt4,self.pt1],1)
def PointField(self):
def __init__(self,i,_num, putin):
self.i = i
self.num = _num
self.putin = putin
self.Ngon = None
self.PtList = None
self.pt1 = (-self.i/2,-self.i/2,0)
self.pt2 = (self.i/2,-self.i/2,0)
self.pt3 = (self.i/2,self.i/2,0)
self.pt4 = (-self.i/2,self.i/2,0)
self.Border = rs.AddCurve([self.pt1,self.pt2,self.pt3,self.pt4,self.pt1],1)
def PointField(self):
x = random.uniform(-self.i/2,self.i/2)
y = random.uniform(-self.i/2,self.i/2)
pt = rs.AddPoint(x,y,0)
self.PtList = rs.PointCoordinates(pt)
I = random.randint(3,5)
self.NgonList = []
if (I == 3):
ThreePt1 = rs.AddPoint((random.randint(0,4)), (random.randint(0,4)), 0)
ThreePt2 = rs.AddPoint((random.randint(-4,0)), (random.randint(-4,4)), 0)
ThreePt3 = rs.AddPoint((random.randint(0,4)), (random.randint(-4,0)), 0)
Shape = rs.AddCurve([ThreePt1,ThreePt2,ThreePt3,ThreePt1], self.putin)
self.Ngon = rs.MoveObject(Shape,self.PtList)
self.NgonList.append(self.Ngon)
self.RecScale(num)
y = random.uniform(-self.i/2,self.i/2)
pt = rs.AddPoint(x,y,0)
self.PtList = rs.PointCoordinates(pt)
I = random.randint(3,5)
self.NgonList = []
if (I == 3):
ThreePt1 = rs.AddPoint((random.randint(0,4)), (random.randint(0,4)), 0)
ThreePt2 = rs.AddPoint((random.randint(-4,0)), (random.randint(-4,4)), 0)
ThreePt3 = rs.AddPoint((random.randint(0,4)), (random.randint(-4,0)), 0)
Shape = rs.AddCurve([ThreePt1,ThreePt2,ThreePt3,ThreePt1], self.putin)
self.Ngon = rs.MoveObject(Shape,self.PtList)
self.NgonList.append(self.Ngon)
self.RecScale(num)
elif (I == 4):
FourPt1 = rs.AddPoint((random.randint(0,4)), (random.randint(0,4)), 0)
FourPt2 = rs.AddPoint((random.randint(-4,0)), (random.randint(0,4)), 0)
FourPt3 = rs.AddPoint((random.randint(-4,0)), (random.randint(-4,0)), 0)
FourPt4 = rs.AddPoint((random.randint(0,4)), (random.randint(-4,0)), 0)
Shape = rs.AddCurve([FourPt1,FourPt2,FourPt3,FourPt4,FourPt1], self.putin)
self.Ngon = rs.MoveObject(Shape,self.PtList)
self.NgonList.append(self.Ngon)
self.RecScale(num)
FourPt1 = rs.AddPoint((random.randint(0,4)), (random.randint(0,4)), 0)
FourPt2 = rs.AddPoint((random.randint(-4,0)), (random.randint(0,4)), 0)
FourPt3 = rs.AddPoint((random.randint(-4,0)), (random.randint(-4,0)), 0)
FourPt4 = rs.AddPoint((random.randint(0,4)), (random.randint(-4,0)), 0)
Shape = rs.AddCurve([FourPt1,FourPt2,FourPt3,FourPt4,FourPt1], self.putin)
self.Ngon = rs.MoveObject(Shape,self.PtList)
self.NgonList.append(self.Ngon)
self.RecScale(num)
elif (I == 5):
FivePt1 = rs.AddPoint((random.randint(-2,2)), (random.randint(2,4)), 0)
FivePt2 = rs.AddPoint((random.randint(-4,-2)), (random.randint(2,4)), 0)
FivePt3 = rs.AddPoint((random.randint(-4,0)), (random.randint(-4,0)), 0)
FivePt4 = rs.AddPoint((random.randint(0,4)), (random.randint(-4,0)), 0)
FivePt5 = rs.AddPoint((random.randint(2,4)), (random.randint(2,4)), 0)
Shape = rs.AddCurve([FivePt1,FivePt2,FivePt3,FivePt4,FivePt5,FivePt1], self.putin)
self.Ngon = rs.MoveObject(Shape,self.PtList)
self.NgonList.append(self.Ngon)
self.RecScale(num)
def RecScale(self, num):
if (num <=1):
return 1
else:
rs.ScaleObject(self.Ngon,self.PtList,[self.num*1,self.num*1,0], True )
return self.RecScale(num-1)
num = 3
put = rs.GetInteger("Input Curve Degrees",1,1,4)
FivePt1 = rs.AddPoint((random.randint(-2,2)), (random.randint(2,4)), 0)
FivePt2 = rs.AddPoint((random.randint(-4,-2)), (random.randint(2,4)), 0)
FivePt3 = rs.AddPoint((random.randint(-4,0)), (random.randint(-4,0)), 0)
FivePt4 = rs.AddPoint((random.randint(0,4)), (random.randint(-4,0)), 0)
FivePt5 = rs.AddPoint((random.randint(2,4)), (random.randint(2,4)), 0)
Shape = rs.AddCurve([FivePt1,FivePt2,FivePt3,FivePt4,FivePt5,FivePt1], self.putin)
self.Ngon = rs.MoveObject(Shape,self.PtList)
self.NgonList.append(self.Ngon)
self.RecScale(num)
def RecScale(self, num):
if (num <=1):
return 1
else:
rs.ScaleObject(self.Ngon,self.PtList,[self.num*1,self.num*1,0], True )
return self.RecScale(num-1)
num = 3
put = rs.GetInteger("Input Curve Degrees",1,1,4)
obj01 = Rec(144,num,put)
for i in range(0,100):
obj01.PointField()
obj01.PointField()
obj01.RecScale(num)
FRACTAL
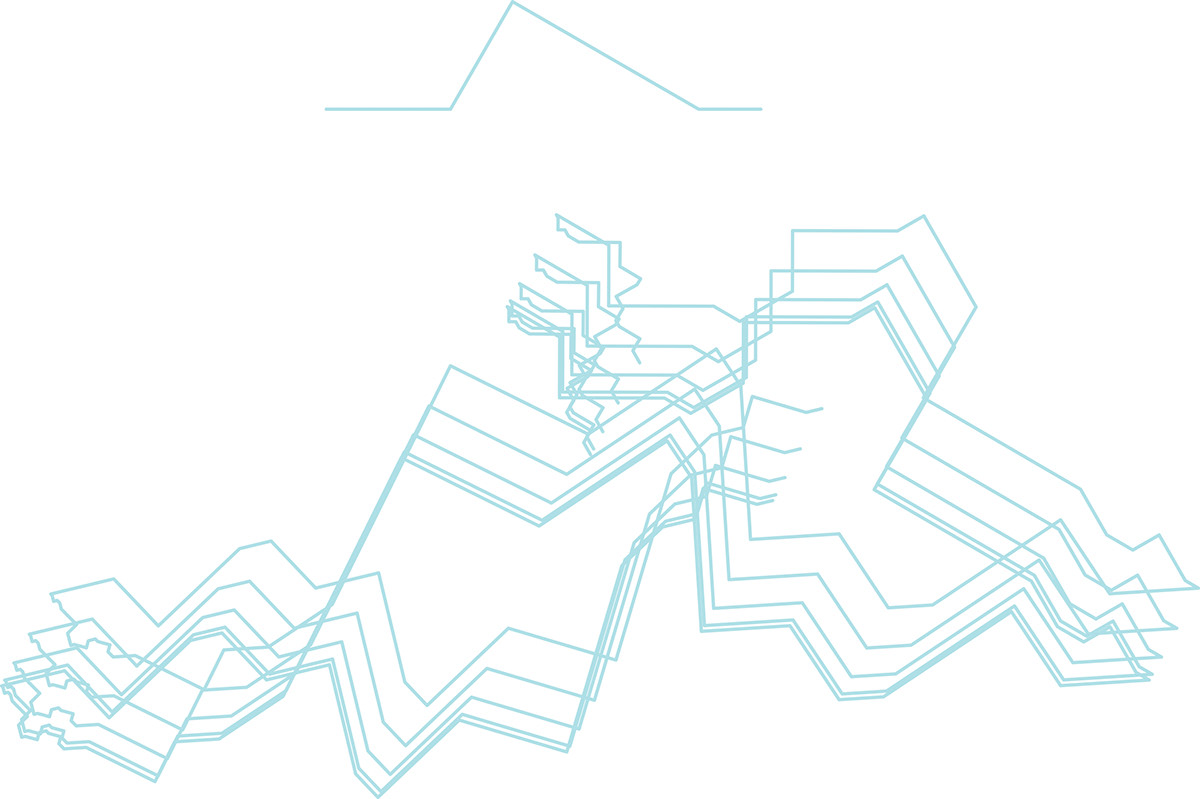
An experiment in fractals and recursion. A user drawn line that can have a fractal begin to substitute for the line. The top line is the fractal and the bottom group is a second generation fractal line put through five recursions
import rhinoscriptsyntax as rs
import math
import random
import math
import random
randptList = []
bList =[]
bList =[]
def RandPoints (Cap):
for i in range (random.randint(2,Cap)):
X = random.randrange(-100,100)
Y = random.randrange(-100,100)
Z = 0
pt = [X,Y,Z]
rs.AddPoint(pt)
randptList.append (pt)
def RandLines(number):
for i in rs.frange (0,number,1):
base = rs.AddPolyline(randptList)
rs.MoveObject(base,[0,i**2,0])
bList.append(base)
for i in rs.frange (0,number,1):
base = rs.AddPolyline(randptList)
rs.MoveObject(base,[0,i**2,0])
bList.append(base)
number = rs.GetInteger("input number of starting points",3,1,10)
Cap = rs.GetInteger("input range cap for random lines",3,1,10)
RandPoints(Cap)
Cap = rs.GetInteger("input range cap for random lines",3,1,10)
RandPoints(Cap)
RandLines(number)
# 2D fractal script selecting a generator curve and base curve
def Frac (gen, base, steps, step):
newbase = []
baseList = rs.CurvePoints(base)
#Base object replaces each segment with generator curve
for i in range (len(baseList)-1):
newbase.append(Replace(baseList[i], baseList[i+1], gen, i))
#old base curve is deleted and new replacement curves are joined
if (len(baseList)) != 1:
rs.DeleteObjects(base)
base = rs.JoinCurves(newbase[:])
rs.DeleteObjects(newbase[:])
if step < steps:
Frac(gen, base, steps, step+1)
#Replace function
def Replace (Pt_Start, Pt_End, genCrv, i):
origin = [0,0,0]
vecStart = rs.VectorCreate (Pt_Start, origin)
vecEnd = rs.VectorCreate (Pt_End, origin)
genStart = rs.CurveStartPoint (genCrv)
genEnd = rs.CurveEndPoint(genCrv)
vecGenStart = rs.VectorCreate (genStart, origin)
vecGenEnd = rs.VectorCreate (genEnd, origin)
temp_end = rs.VectorSubtract (vecEnd, vecStart)
temp_Gen_end = rs.VectorSubtract (vecGenEnd, vecGenStart)
mag = rs.VectorLength (temp_end)
amag = rs.VectorLength (temp_Gen_end)
scale_factor = mag / amag
CpyGen = rs.CopyObject (genCrv)
rs.ScaleObject (CpyGen, genStart, [scale_factor, scale_factor, scale_factor])
anglex = math.atan2 (temp_end[1], temp_end [0])
anglex = math.degrees(anglex)
angle_gen_x = math.atan2(temp_Gen_end[1], temp_Gen_end[0])
angle_gen_x = math.degrees(angle_gen_x)
if angle_gen_x != 0:
rs.RotateObject(CpyGen, genStart, anglex - angle_gen_x)
else:
rs.RotateObject(CpyGen, genStart, anglex)
if i%2 is 0:
rs.MirrorObject(CpyGen, rs.CurveStartPoint(CpyGen), rs.CurveEndPoint(CpyGen))
def Frac (gen, base, steps, step):
newbase = []
baseList = rs.CurvePoints(base)
#Base object replaces each segment with generator curve
for i in range (len(baseList)-1):
newbase.append(Replace(baseList[i], baseList[i+1], gen, i))
#old base curve is deleted and new replacement curves are joined
if (len(baseList)) != 1:
rs.DeleteObjects(base)
base = rs.JoinCurves(newbase[:])
rs.DeleteObjects(newbase[:])
if step < steps:
Frac(gen, base, steps, step+1)
#Replace function
def Replace (Pt_Start, Pt_End, genCrv, i):
origin = [0,0,0]
vecStart = rs.VectorCreate (Pt_Start, origin)
vecEnd = rs.VectorCreate (Pt_End, origin)
genStart = rs.CurveStartPoint (genCrv)
genEnd = rs.CurveEndPoint(genCrv)
vecGenStart = rs.VectorCreate (genStart, origin)
vecGenEnd = rs.VectorCreate (genEnd, origin)
temp_end = rs.VectorSubtract (vecEnd, vecStart)
temp_Gen_end = rs.VectorSubtract (vecGenEnd, vecGenStart)
mag = rs.VectorLength (temp_end)
amag = rs.VectorLength (temp_Gen_end)
scale_factor = mag / amag
CpyGen = rs.CopyObject (genCrv)
rs.ScaleObject (CpyGen, genStart, [scale_factor, scale_factor, scale_factor])
anglex = math.atan2 (temp_end[1], temp_end [0])
anglex = math.degrees(anglex)
angle_gen_x = math.atan2(temp_Gen_end[1], temp_Gen_end[0])
angle_gen_x = math.degrees(angle_gen_x)
if angle_gen_x != 0:
rs.RotateObject(CpyGen, genStart, anglex - angle_gen_x)
else:
rs.RotateObject(CpyGen, genStart, anglex)
if i%2 is 0:
rs.MirrorObject(CpyGen, rs.CurveStartPoint(CpyGen), rs.CurveEndPoint(CpyGen))
translation = rs.VectorCreate(vecStart, genStart)
newBase = rs.MoveObject(CpyGen, translation)
return newBase
newBase = rs.MoveObject(CpyGen, translation)
return newBase
gen = rs.GetObject("generator", 4, True)
#base = [rs.GetObject("base", 4, True)]
steps = rs.GetInteger("number of stops", 3, 1, 15)
#base = [rs.GetObject("base", 4, True)]
steps = rs.GetInteger("number of stops", 3, 1, 15)
for k in range(0,number):
base = bList[k]
Frac (gen, base, steps, 3)
if k == number:
base = bList[k+1]
rs.DeleteObject(base)
base = bList[k]
Frac (gen, base, steps, 3)
if k == number:
base = bList[k+1]
rs.DeleteObject(base)
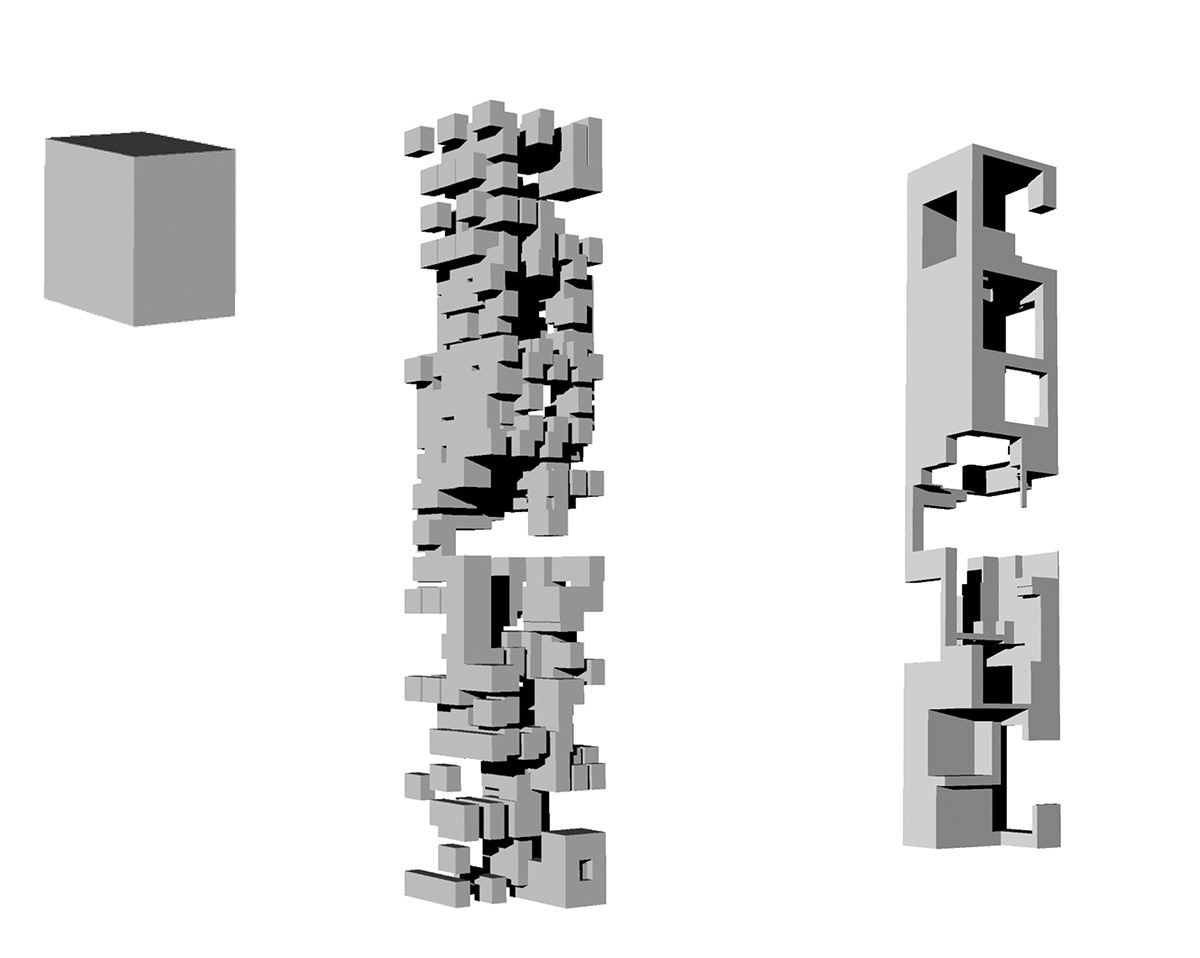
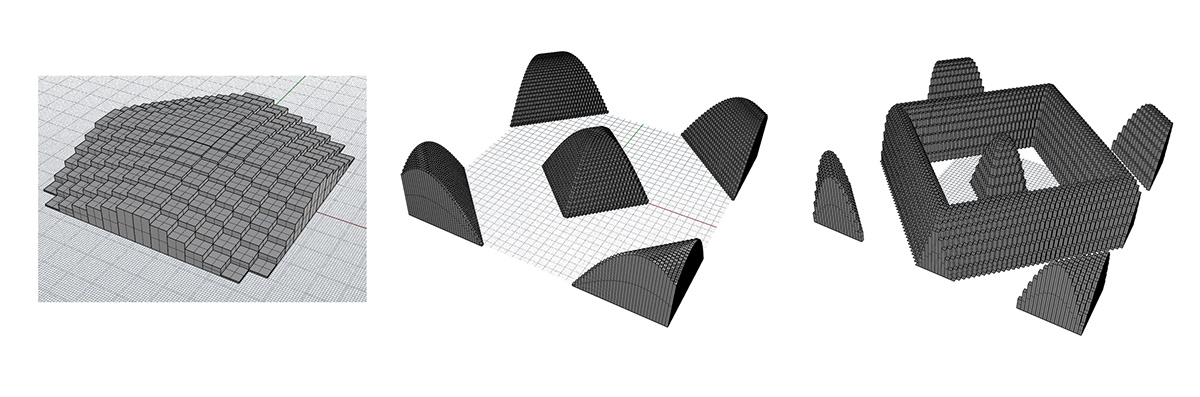
An experimentation in sponge coding. This is similar to the fractal type code above but rahther than a 2d line this code replaces a solid with a fractal geometry, by placing this fractal at the corners, and midpoints of the edges of a solid.
import rhinoscriptsyntax as rs
import random
corners=[0,0,0,1,0,0,1,1,0,0,1,0,0,0,1,1,0,1,1,1,1,0,1,1]
import random
corners=[0,0,0,1,0,0,1,1,0,0,1,0,0,0,1,1,0,1,1,1,1,0,1,1]
random.seed (1) # optional, in order to repeat randomness
arrObject =[]
arrBoolObject =[]
arrObject =[]
arrBoolObject =[]
object=rs.AddBox (corners)
eObject=rs.ScaleObject (object, [0,0,0], [8,8,50])
arrBoolObject.append(eObject)
eObject=rs.ScaleObject (object, [0,0,0], [8,8,50])
arrBoolObject.append(eObject)
# Create boolean difference tower to use as base for sponge
for i in range (50):
xPos=random.randrange(0,6)
yPos=random.randrange(0,6)
zPos=random.randrange(0,45)
object=rs.AddBox (corners)
position=[xPos,yPos,zPos]
mObject=rs.MoveObject (object,position)
sObject=rs.ScaleObject (mObject, position, [random.uniform(4,6),random.uniform(4,6),random.uniform(4,6)])
arrObject.append(sObject)
zoneObject=rs.BooleanDifference(arrBoolObject[i],arrObject[i])
arrBoolObject.append(zoneObject)
for i in range (50):
xPos=random.randrange(0,6)
yPos=random.randrange(0,6)
zPos=random.randrange(0,45)
object=rs.AddBox (corners)
position=[xPos,yPos,zPos]
mObject=rs.MoveObject (object,position)
sObject=rs.ScaleObject (mObject, position, [random.uniform(4,6),random.uniform(4,6),random.uniform(4,6)])
arrObject.append(sObject)
zoneObject=rs.BooleanDifference(arrBoolObject[i],arrObject[i])
arrBoolObject.append(zoneObject)
def Main():
obj = []
obj.append(rs.GetObject("Set base object:", 16))
step = 1
obj02 = []
obj02.append(rs.GetObject("Set modular object:",16))
endstep = rs.GetInteger("How many steps?", 3,1,8)
rs.EnableRedraw(False)
Sponge(obj, obj02, step, endstep)
# Each step a base object is replaced
obj = []
obj.append(rs.GetObject("Set base object:", 16))
step = 1
obj02 = []
obj02.append(rs.GetObject("Set modular object:",16))
endstep = rs.GetInteger("How many steps?", 3,1,8)
rs.EnableRedraw(False)
Sponge(obj, obj02, step, endstep)
# Each step a base object is replaced
def Sponge(obj, obj02, step, endstep):
#Getting edge curves of the base object
edge = rs.DuplicateEdgeCurves(obj)
#Getting edge curves of the base object
edge = rs.DuplicateEdgeCurves(obj)
end = []
mid = []
scale = []
# End and mid point for every edge curve
for i in range(len(edge)):
end.append(rs.CurveEndPoint(edge[i]))
mid.append(rs.CurveMidPoint(edge[i]))
#Deleting duplicates
rs.DeleteObjects(edge)
#end = list(set(end))
#Scaling base object and placing it in every corner
for i in range(len(end)):
scale.append(rs.ScaleObject(obj02, end[i], (1/4,1/4,1/4), True))
mid = []
scale = []
# End and mid point for every edge curve
for i in range(len(edge)):
end.append(rs.CurveEndPoint(edge[i]))
mid.append(rs.CurveMidPoint(edge[i]))
#Deleting duplicates
rs.DeleteObjects(edge)
#end = list(set(end))
#Scaling base object and placing it in every corner
for i in range(len(end)):
scale.append(rs.ScaleObject(obj02, end[i], (1/4,1/4,1/4), True))
#Scaling base object and placing it to the middle of every edge
for i in range(len(mid)):
scale.append(rs.ScaleObject(obj02, mid[i],(1/4, 1/4, 1/4), True))
for i in range(len(mid)):
scale.append(rs.ScaleObject(obj02, mid[i],(1/4, 1/4, 1/4), True))
#Deleting base ojb
rs.DeleteObject(obj)
#Recursion
if step < endstep:
for i in range(len(scale)):
Sponge(scale[i],step+1, endstep)
#print scale
Union = rs.BooleanUnion(scale)
print Union
rs.DeleteObject(obj)
#Recursion
if step < endstep:
for i in range(len(scale)):
Sponge(scale[i],step+1, endstep)
#print scale
Union = rs.BooleanUnion(scale)
print Union
Main()

Stochastic search box. Tis code introduces a stochastic search within a defined area adding color to even and odd boxes.
import rhinoscriptsyntax as rs
import random
import random
corners=[0,0,0,1,0,0,1,1,0,0,1,0,0,0,1,1,0,1,1,1,1,0,1,1]
arrX=[]
arrY=[]
arrZ=[]
arrX=[]
arrY=[]
arrZ=[]
oddList = []
evenList = []
evenList = []
# Stochastic search for loop
for i in range (500):
sv=0
while True:
rx=random.randint(0,10)
ry=random.randint(0,10)
rz=random.randint(0,10)
overlap = False
for j in range (i):
diffx=abs(arrX[j]-rx)
diffy=abs(arrY[j]-ry)
diffz=abs(arrZ[j]-rz)
if(diffx<1 and diffy<1 and diffz<1):
overlap=True
if overlap==False:
arrX.append(rx)
arrY.append(ry)
arrZ.append(rz)
cube=rs.AddBox(corners)
rs.MoveObject(cube,[arrX[i],arrY[i],arrZ[i]])
for i in range (500):
sv=0
while True:
rx=random.randint(0,10)
ry=random.randint(0,10)
rz=random.randint(0,10)
overlap = False
for j in range (i):
diffx=abs(arrX[j]-rx)
diffy=abs(arrY[j]-ry)
diffz=abs(arrZ[j]-rz)
if(diffx<1 and diffy<1 and diffz<1):
overlap=True
if overlap==False:
arrX.append(rx)
arrY.append(ry)
arrZ.append(rz)
cube=rs.AddBox(corners)
rs.MoveObject(cube,[arrX[i],arrY[i],arrZ[i]])
# Modulus of 2 to place objects into 2 different lists
if i%2 == 0:
evenList.append(cube)
else:
oddList.append(cube)
break
if sv>1000:
print "not found"
break
sv=sv+1
if i%2 == 0:
evenList.append(cube)
else:
oddList.append(cube)
break
if sv>1000:
print "not found"
break
sv=sv+1
# Color definition
def parametercolor(parameter):
red = parameter
if red<0: red=0
if red>255: red=255
return (red,150,255-red)
# Calling the even and odd lists to have them colored
rs.ObjectColor(evenList,parametercolor(50))
rs.ObjectColor(oddList,parametercolor(250))
rs.ObjectColor(evenList,parametercolor(50))
rs.ObjectColor(oddList,parametercolor(250))
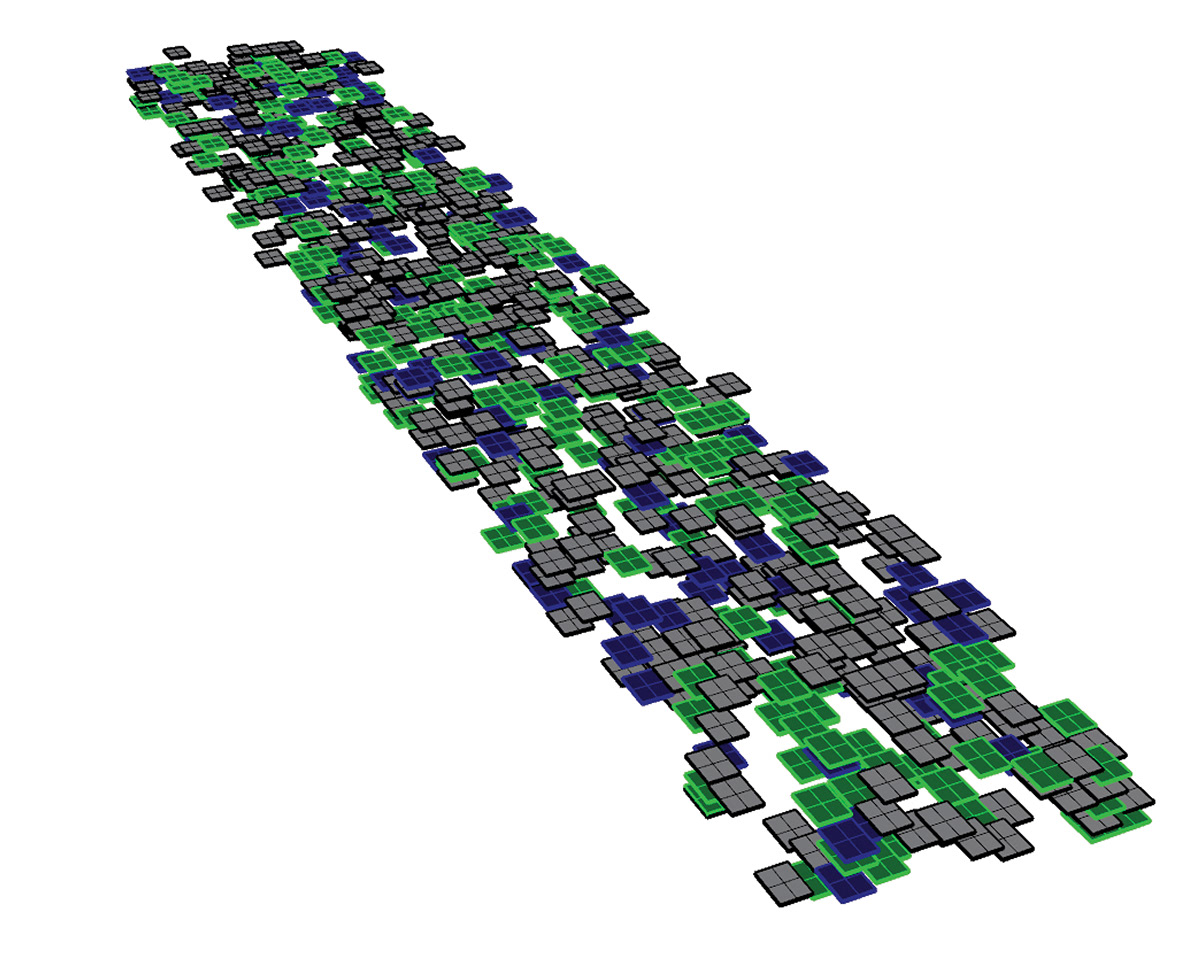

The above two images show a stochastic search bridge that also uses color to change boxes. This begins to represent the use of python to start identifying spaces and relationships for master planning.
import rhinoscriptsyntax as rs
import random
import random
corners=[0,0,0,1,0,0,1,1,0,0,1,0,0,0,1,1,0,1,1,1,1,0,1,1]
arrX=[]
arrY=[]
arrZ=[]
arrX=[]
arrY=[]
arrZ=[]
ZList = []
OList = []
TList = []
OList = []
TList = []
# Stochastic search for loop
for i in range (1500):
sv=0
while True:
rx=random.randint(0,50)
ry=random.randint(0,10)
rz=random.randint(0,30)
overlap = False
for j in range (i):
diffx=abs(arrX[j]-rx)
diffy=abs(arrY[j]-ry)
diffz=abs(arrZ[j]-rz)
if(diffx<1 and diffy<1 and diffz<1):
overlap=True
if overlap==False:
arrX.append(rx)
arrY.append(ry)
arrZ.append(rz)
cube=rs.AddBox(corners)
rs.MoveObject(cube,[arrX[i],arrY[i],arrZ[i]])
rs.ScaleObject(cube,[0,0,0],[8,4,1])
for i in range (1500):
sv=0
while True:
rx=random.randint(0,50)
ry=random.randint(0,10)
rz=random.randint(0,30)
overlap = False
for j in range (i):
diffx=abs(arrX[j]-rx)
diffy=abs(arrY[j]-ry)
diffz=abs(arrZ[j]-rz)
if(diffx<1 and diffy<1 and diffz<1):
overlap=True
if overlap==False:
arrX.append(rx)
arrY.append(ry)
arrZ.append(rz)
cube=rs.AddBox(corners)
rs.MoveObject(cube,[arrX[i],arrY[i],arrZ[i]])
rs.ScaleObject(cube,[0,0,0],[8,4,1])
# Modulus of 3 to place objects into 3 different lists
if i%3 == 0:
ZList.append(cube)
elif i%3 == 1:
OList.append(cube)
elif i%3 == 2:
TList.append(cube)
if i%3 == 0:
ZList.append(cube)
elif i%3 == 1:
OList.append(cube)
elif i%3 == 2:
TList.append(cube)
break
if sv>10000:
print "not found"
break
sv=sv+1
if sv>10000:
print "not found"
break
sv=sv+1
# Color and scale according to lists
rs.ObjectColor(OList,[0,200,0])
rs.ObjectColor(TList,[0,0,150])
rs.ScaleObject(ZList,[0,0,0],[2,3,1])
rs.MoveObject(ZList,[-200,-45,0])
rs.ObjectColor(OList,[0,200,0])
rs.ObjectColor(TList,[0,0,150])
rs.ScaleObject(ZList,[0,0,0],[2,3,1])
rs.MoveObject(ZList,[-200,-45,0])
# Delete 3/4 of objects in TList
for k in range (500):
obj = TList[k]
if k%4 == 0:
rs.DeleteObject(obj)
elif k%4 == 1:
rs.ScaleObject(obj,[0,0,0],[2,3,1])
rs.MoveObject(obj,[-200,-45,0])
if k%4 == 2:
rs.DeleteObject(obj)
if k%4 == 3:
rs.DeleteObject(obj)
for k in range (500):
obj = TList[k]
if k%4 == 0:
rs.DeleteObject(obj)
elif k%4 == 1:
rs.ScaleObject(obj,[0,0,0],[2,3,1])
rs.MoveObject(obj,[-200,-45,0])
if k%4 == 2:
rs.DeleteObject(obj)
if k%4 == 3:
rs.DeleteObject(obj)
# Delete 1/2 of objects in OList
for l in range (500):
obj = OList[l]
if l%2 == 0:
rs.DeleteObject(obj)
elif l%2 == 1:
rs.ScaleObject(obj,[0,0,0],[2,3,1])
rs.MoveObject(obj,[-200,-45,0])
for l in range (500):
obj = OList[l]
if l%2 == 0:
rs.DeleteObject(obj)
elif l%2 == 1:
rs.ScaleObject(obj,[0,0,0],[2,3,1])
rs.MoveObject(obj,[-200,-45,0])
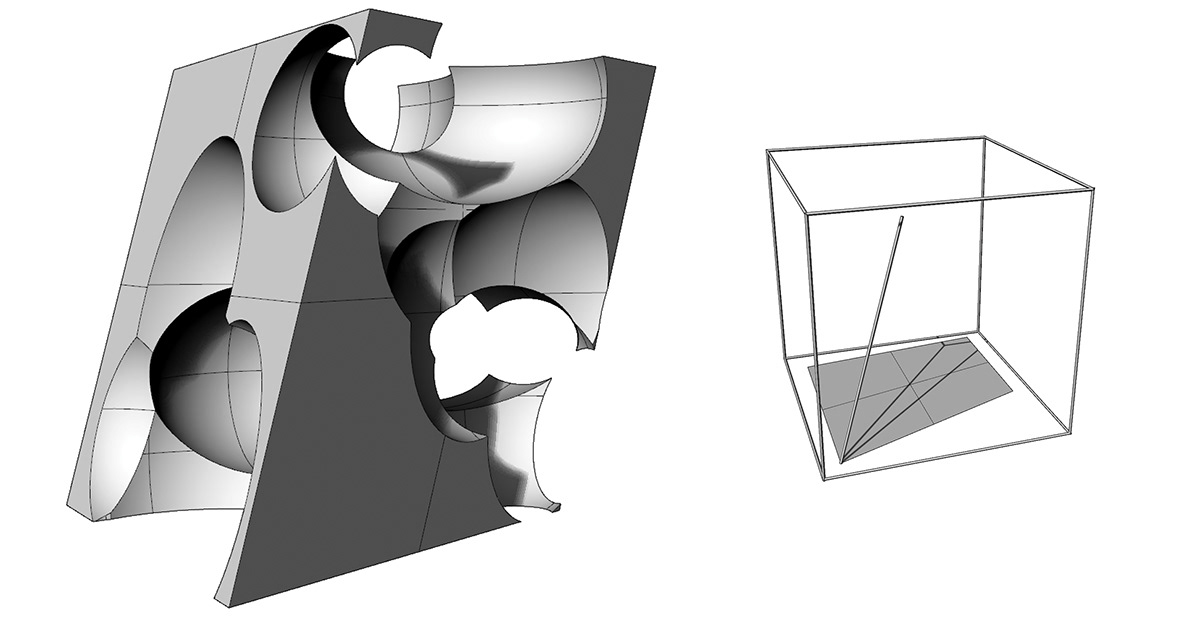
This was an experimentation on an automated boolean difference. The user can input a plane and extrude it by a drawn line to custom create an object within a bounding frame (which is what can be seen on the right). The result of the boolean difference is on the left with spheres randomly removed from the user created solid.
import rhinoscriptsyntax as rs
import random
import random
corners=[0,0,0,1,0,0,1,1,0,0,1,0,0,0,1,1,0,1,1,1,1,0,1,1]
pt1=[0,0,0]
pt2=[100,0,0]
pt3=[100,100,0]
pt4=[0,100,0]
pt5=[0,0,100]
pt6=[100,0,100]
pt7=[100,100,100]
pt8=[0,100,100]
pt1=[0,0,0]
pt2=[100,0,0]
pt3=[100,100,0]
pt4=[0,100,0]
pt5=[0,0,100]
pt6=[100,0,100]
pt7=[100,100,100]
pt8=[0,100,100]
arrObject =[]
arrBoolObject =[]
backupList = []
# Create Bounding Box
BndBox = rs.AddCurve([pt1,pt2,pt3,pt4,pt1,pt5,pt6,pt2,pt6,pt7,pt3,pt7,pt8,pt4,pt8,pt5],1)
arrBoolObject =[]
backupList = []
# Create Bounding Box
BndBox = rs.AddCurve([pt1,pt2,pt3,pt4,pt1,pt5,pt6,pt2,pt6,pt7,pt3,pt7,pt8,pt4,pt8,pt5],1)
# User Inputs, Asking to draw an Object within the Bounding Box
surf = rs.GetObject("Draw or select surface to be extruded",8)
curve = rs.GetObject("Draw or select curve to be extruded along", 4)
object = rs.ExtrudeSurface(surf,curve,True)
arrBoolObject.append(object)
Range = rs.GetInteger("Input max range for random boolean")
S1Range = rs.GetInteger("Input min scale range for boolean objects")
S2Range = rs.GetInteger("Input max scale range for boolean objects")
surf = rs.GetObject("Draw or select surface to be extruded",8)
curve = rs.GetObject("Draw or select curve to be extruded along", 4)
object = rs.ExtrudeSurface(surf,curve,True)
arrBoolObject.append(object)
Range = rs.GetInteger("Input max range for random boolean")
S1Range = rs.GetInteger("Input min scale range for boolean objects")
S2Range = rs.GetInteger("Input max scale range for boolean objects")
# Boolean Difference definition
def Boolean(sv,R,S1,S2):
for i in range (sv,R):
xPos=random.uniform(5,90)
yPos=random.uniform(5,90)
zPos=random.randrange(5,90)
object=rs.AddSphere([0,0,0],2)
position=[xPos,yPos,zPos]
mObject=rs.MoveObject (object,position)
sObject=rs.ScaleObject (mObject, position, [random.randrange(S1,S2),random.randrange(S1,S2),random.randrange(S1,S2)])
arrObject.append(sObject)
backupList.append(arrBoolObject[i])
zoneObject=rs.BooleanDifference(arrBoolObject[i],arrObject[i])
print i
print sv
print arrBoolObject [i]
print zoneObject
# Failsafe: If ZoneObject outputs NONE, return to the definition (BETA)
if zoneObject == []:
print "none"
arrBoolObject.append(backupList[i])
sv = sv+1
return Boolean(sv,R,S1,S2)
else:
arrBoolObject.append(zoneObject)
sv = sv+1
# Executing definition
sv = 0
Boolean(sv,Range,S1Range,S2Range)
rs.DeleteObjects([surf,curve,BndBox])
def Boolean(sv,R,S1,S2):
for i in range (sv,R):
xPos=random.uniform(5,90)
yPos=random.uniform(5,90)
zPos=random.randrange(5,90)
object=rs.AddSphere([0,0,0],2)
position=[xPos,yPos,zPos]
mObject=rs.MoveObject (object,position)
sObject=rs.ScaleObject (mObject, position, [random.randrange(S1,S2),random.randrange(S1,S2),random.randrange(S1,S2)])
arrObject.append(sObject)
backupList.append(arrBoolObject[i])
zoneObject=rs.BooleanDifference(arrBoolObject[i],arrObject[i])
print i
print sv
print arrBoolObject [i]
print zoneObject
# Failsafe: If ZoneObject outputs NONE, return to the definition (BETA)
if zoneObject == []:
print "none"
arrBoolObject.append(backupList[i])
sv = sv+1
return Boolean(sv,R,S1,S2)
else:
arrBoolObject.append(zoneObject)
sv = sv+1
# Executing definition
sv = 0
Boolean(sv,Range,S1Range,S2Range)
rs.DeleteObjects([surf,curve,BndBox])
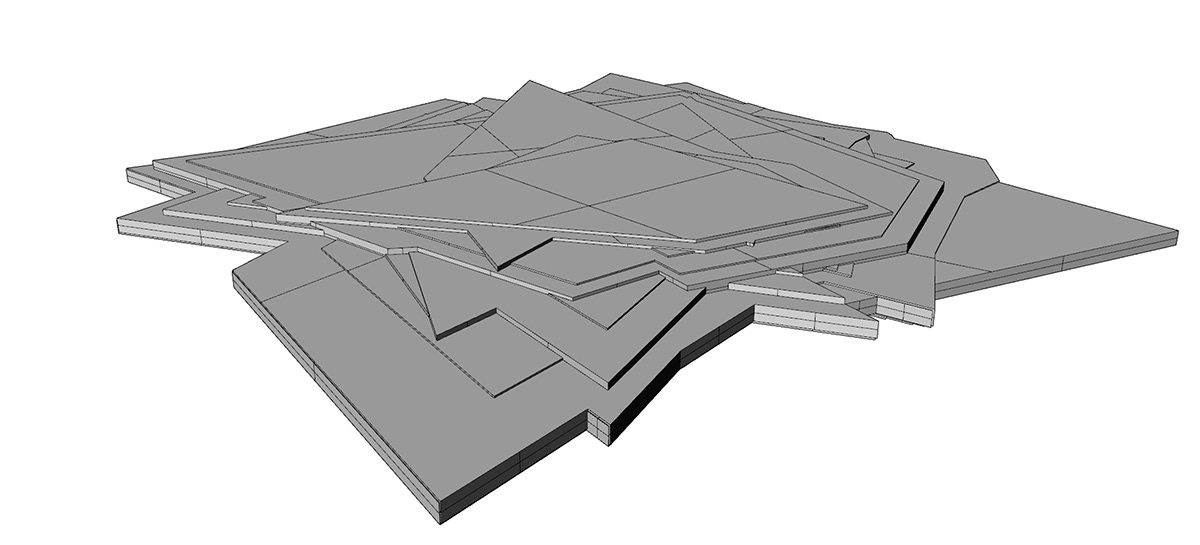
This is an experimentation on an automated boolean union. The user is allowed to create a srface that is then extruded, moved and then finally booleaned together.
import rhinoscriptsyntax as rs
import random
import random
randList=[]
def randPoint ():
pt1 =[random.randrange(1,100),random.randrange(1,100),0]
pt2 =[random.randrange(-100,-1),random.randrange(1,100),0]
pt3 =[random.randrange(-100,-1),random.randrange(-100,-1),0]
pt4 =[random.randrange(1,100),random.randrange(-100,-1),0]
randList.append(pt1)
randList.append(pt2)
randList.append(pt3)
randList.append(pt4)
randList.append(pt1)
pt1 =[random.randrange(1,100),random.randrange(1,100),0]
pt2 =[random.randrange(-100,-1),random.randrange(1,100),0]
pt3 =[random.randrange(-100,-1),random.randrange(-100,-1),0]
pt4 =[random.randrange(1,100),random.randrange(-100,-1),0]
randList.append(pt1)
randList.append(pt2)
randList.append(pt3)
randList.append(pt4)
randList.append(pt1)
arrObject =[]
arrBoolObject =[]
#Random object creation for loop
for i in range (20):
rPos=random.uniform(-.5,.5)
rScale=random.uniform (2.5,3.5)
randPoint()
baseCrv = rs.AddCurve(randList,1)
srf = rs.AddPlanarSrf(baseCrv)
line = rs.AddLine([0,0,0],[0,0,10])
object = rs.ExtrudeSurface(srf, line)
rs.DeleteObject(line)
#Move the objects in a random X,Y direction as well as
#Moving the objects first up then done in order to create a
#Grouping of objects that appears more random
position=[rPos,rPos,-i+3]
mObject=rs.MoveObject (object,position)
sObject=rs.ScaleObject (mObject, position, [rScale,rScale,1])
arrObject.append(sObject)
#Union the first two objects
initBoolObject=rs.BooleanUnion ([arrObject[0],arrObject[1]])
arrBoolObject.append(initBoolObject)
for i in range (20):
rPos=random.uniform(-.5,.5)
rScale=random.uniform (2.5,3.5)
randPoint()
baseCrv = rs.AddCurve(randList,1)
srf = rs.AddPlanarSrf(baseCrv)
line = rs.AddLine([0,0,0],[0,0,10])
object = rs.ExtrudeSurface(srf, line)
rs.DeleteObject(line)
#Move the objects in a random X,Y direction as well as
#Moving the objects first up then done in order to create a
#Grouping of objects that appears more random
position=[rPos,rPos,-i+3]
mObject=rs.MoveObject (object,position)
sObject=rs.ScaleObject (mObject, position, [rScale,rScale,1])
arrObject.append(sObject)
#Union the first two objects
initBoolObject=rs.BooleanUnion ([arrObject[0],arrObject[1]])
arrBoolObject.append(initBoolObject)
#Boolean union for loop
for j in range (2,20):
#Union the next object with the previous boolean object
resultObject=rs.BooleanUnion ([arrBoolObject[j-2],arrObject[j]])
#Append the boolean object to the boolean array
arrBoolObject.append(resultObject)
for j in range (2,20):
#Union the next object with the previous boolean object
resultObject=rs.BooleanUnion ([arrBoolObject[j-2],arrObject[j]])
#Append the boolean object to the boolean array
arrBoolObject.append(resultObject)
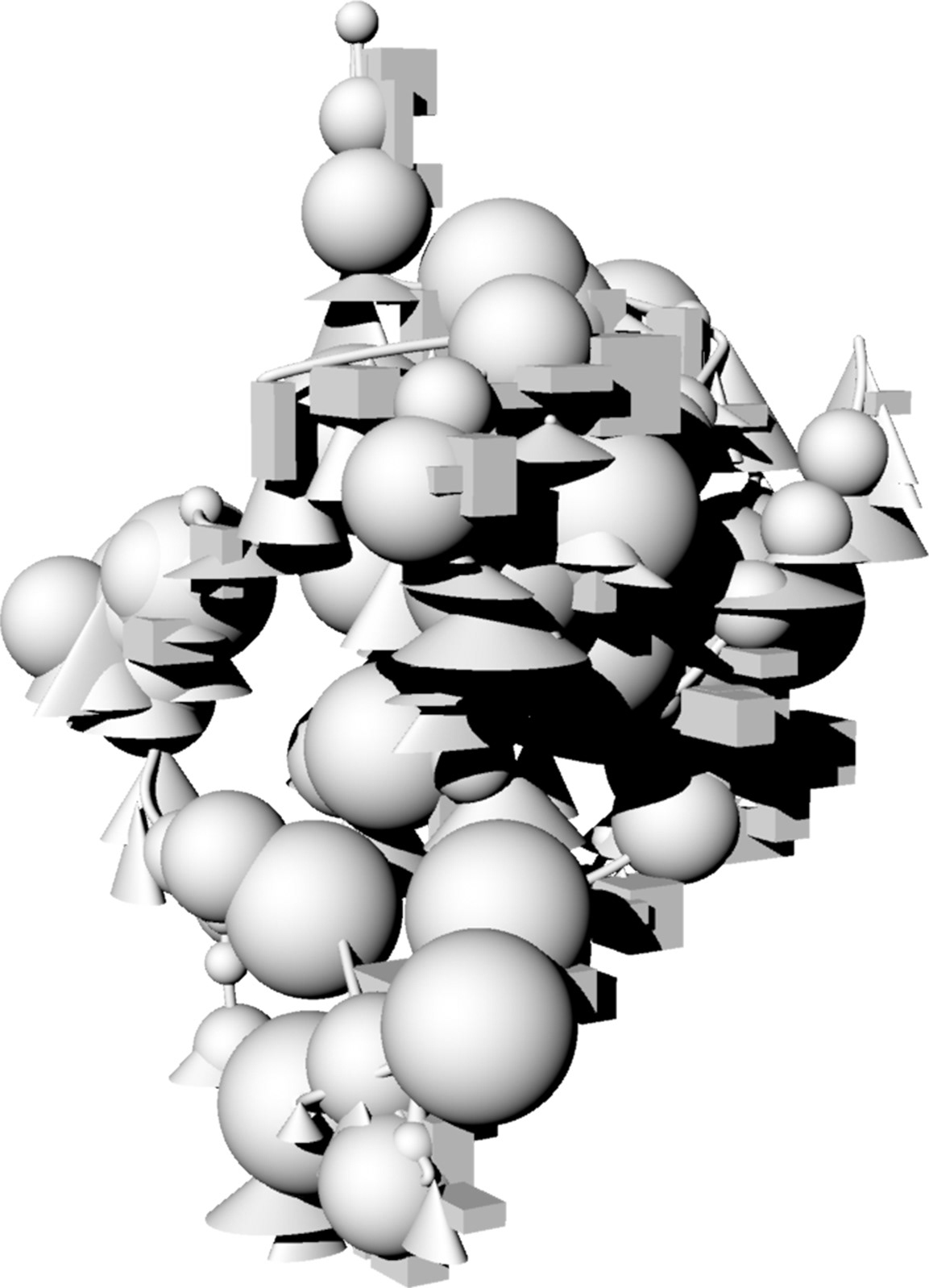
FLOCKING
import random
import math
import rhinoscriptsyntax as rs
class Bird():
def __init__(self):
self.X = random.randint(0, 50)
self.Y = random.randint(0, 50)
self.Z = random.randint(0, 100)
self.VelocityX = random.randint(1,20) / 10.0
self.VelocityY = random.randint(1,20) / 10.0
self.VelocityZ = random.randint(1,20) / 10.0
self.MaxVelocity = 5
self.rand = None
import math
import rhinoscriptsyntax as rs
class Bird():
def __init__(self):
self.X = random.randint(0, 50)
self.Y = random.randint(0, 50)
self.Z = random.randint(0, 100)
self.VelocityX = random.randint(1,20) / 10.0
self.VelocityY = random.randint(1,20) / 10.0
self.VelocityZ = random.randint(1,20) / 10.0
self.MaxVelocity = 5
self.rand = None
def drawBird(self):
point = [self.X, self.Y, self.Z]
pts = rs.AddPoint(point)
rs.MoveObject(self.randomShape(),pts)
def randomShape(self):
self.rand = random.randint(1,3)
if self.rand == 1:
sphere = rs.AddSphere((0,0,0),2)
randNum = random.randint(1,4)
sSphere = rs.ScaleObject(sphere,(0,0,0),
(randNum,randNum,randNum))
return sSphere
if self.rand == 2:
box = rs.AddBox([0,0,0,2,0,0,2,2,0,0,2,0,0,0,
2,2,0,2,2,2,2,0,2,2])
sBox = rs.ScaleObject(box,(0,0,0),
(random.randint(1,4),random.randint(1,4),
random.randint(1,4)))
return sBox
if self.rand == 3:
cone = rs.AddCone((0,0,0),3,2)
sCone = rs.ScaleObject(cone,(0,0,0),
(random.randint(1,4),random.randint(1,4),
random.randint(1,4)))
return sCone
def getDistance(self, otherBird):
distX = self.X - otherBird.X
distY = self.Y - otherBird.Y
distZ = self.Z - otherBird.Z
result = math.sqrt(distX * distX + distY * distY + distZ * distZ)
return result
def stayClose(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + (self.X - otherBird.X)
diff_Y = diff_Y + (self.Y - otherBird.Y)
diff_Z = diff_Z + (self.Z - otherBird.Z)
avgX = diff_X/ len(nearBirds)
avgY = diff_Y/ len(nearBirds)
avgZ = diff_Z/ len(nearBirds)
self.VelocityX = self.VelocityX - (avgX / 100)
self.VelocityY = self.VelocityY - (avgY / 100)
self.VelocityZ = self.VelocityZ - (avgZ / 100)
def matchVelocity(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + otherBird.VelocityX
diff_Y = diff_Y + otherBird.VelocityY
diff_Z = diff_Z + otherBird.VelocityZ
avgX = diff_X / len(nearBirds)
avgY = diff_Y / len(nearBirds)
avgZ = diff_Z / len(nearBirds)
self.VelocityX = self.VelocityX + (avgX / 40)
self.VelocityY = self.VelocityY + (avgY / 40)
self.VelocityZ = self.VelocityZ + (avgZ / 40)
def avoidCollision(self, nearBirds):
distanceX = 0
distanceY = 0
distanceZ = 0
minDistance = 30
for otherBird in nearBirds:
distance = self.getDistance(otherBird)
if distance < minDistance:
diff_X = (self.X - otherBird.X)
if diff_X >= 0:
diff_X = math.sqrt(minDistance) - diff_X
else:
diff_X = -math.sqrt(minDistance) - diff_X
distanceX = distanceX + diff_X
diff_Y = (self.Y - otherBird.Y)
if diff_Y >= 0:
diff_Y = math.sqrt(minDistance) - diff_Y
else:
diff_Y = -math.sqrt(minDistance) - diff_Y
distanceY = distanceY + diff_Y
diff_Z = (self.Z - otherBird.Z)
if diff_Z >= 0:
diff_Z = math.sqrt(minDistance) - diff_Z
else:
diff_Z = -math.sqrt(minDistance) - diff_Z
distanceZ = distanceZ + diff_Z
self.VelocityX = self.VelocityX - (distanceX / 5)
self.VelocityY = self.VelocityY - (distanceY / 5)
self.VelocityZ = self.VelocityZ - (distanceZ / 5)
def updatePosition(self):
self.X = self.X + self.VelocityX
self.Y = self.Y + self.VelocityY
self.Z = self.Z + self.VelocityZ
pos = rs.AddPoint(self.X, self.Y, self.Z)
return pos
def checkMaxVelocity(self):
velocityConditionX = abs(self.VelocityX) > self.MaxVelocity
velocityConditionY = abs(self.VelocityY) > self.MaxVelocity
velocityConditionZ = abs(self.VelocityZ) > self.MaxVelocity
if velocityConditionX or velocityConditionY or velocityConditionZ:
maxValue = max(abs(self.VelocityX), abs(self.VelocityY), abs(self.VelocityZ))
scaleFactor = self.MaxVelocity / maxValue
self.VelocityX = self.VelocityX * scaleFactor
self.VelocityY = self.VelocityY * scaleFactor
self.VelocityZ = self.VelocityZ * scaleFactor
def checkBounds(self):
boundX = 50
boundY = 50
boundZ = 100
if self.X < 0 and self.VelocityX < 0:
self.VelocityX = -self.VelocityX
if self.X > boundX and self.VelocityX > 0:
self.VelocityX = -self.VelocityX
if self.Y < 0 and self.VelocityY < 0:
self.VelocityY = -self.VelocityY
if self.Y > boundY and self.VelocityY > 0:
self.VelocityY = -self.VelocityY
if self.Z < 0 and self.VelocityZ < 0:
self.VelocityZ = -self.VelocityZ
if self.Z > boundZ and self.VelocityZ > 0:
self.VelocityZ = -self.VelocityZ
def updateBird(self, NearBirds):
self.stayClose(NearBirds)
self.matchVelocity(NearBirds)
self.avoidCollision(NearBirds)
self.checkBounds();
self.checkMaxVelocity()
point = self.updatePosition()
self.drawBird()
return point
class Flock():
def __init__(self):
self.AllBirds = []
self.NearBirds = []
self.NumBirds = 5
self.Repeat = 50
def generateInitialBirds(self):
for i in range(self.NumBirds):
b = Bird()
self.AllBirds.append(b)
def runFlocking(self):
for bird in self.AllBirds:
BirdPath = []
for i in range(self.Repeat):
self.findNearBirds(bird)
pathPoint = bird.updateBird(self.NearBirds)
BirdPath.append(pathPoint)
Path = rs.AddCurve(BirdPath,2)
rs.AddPipe(Path,0,.5,1,2)
def findNearBirds(self, bird):
self.NearBirds = []
for newBird in self.AllBirds:
self.NearBirds = []
for newBird in self.AllBirds:
if bird == newBird:
pass
pass
else:
distance = bird.getDistance(newBird)
if distance < 600:
self.NearBirds.append(newBird)
else:
pass
def main(self):
self.generateInitialBirds()
self.runFlocking()
f = Flock()
f.main()
distance = bird.getDistance(newBird)
if distance < 600:
self.NearBirds.append(newBird)
else:
pass
def main(self):
self.generateInitialBirds()
self.runFlocking()
f = Flock()
f.main()

import random
import math
import rhinoscriptsyntax as rs
class Bird():
def __init__(self):
self.X = random.randint(0, 50)
self.Y = random.randint(0, 50)
self.Z = random.randint(0, 100)
self.VelocityX = random.randint(1,20) / 10.0
self.VelocityY = random.randint(1,20) / 10.0
self.VelocityZ = random.randint(1,20) / 10.0
self.MaxVelocity = 5
def drawBird(self):
point = [self.X, self.Y, self.Z]
rs.AddPoint(point)
def getDistance(self, otherBird):
distX = self.X - otherBird.X
distY = self.Y - otherBird.Y
distZ = self.Z - otherBird.Z
result = math.sqrt(distX * distX + distY * distY + distZ * distZ)
return result
def stayClose(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + (self.X - otherBird.X)
diff_Y = diff_Y + (self.Y - otherBird.Y)
diff_Z = diff_Z + (self.Z - otherBird.Z)
avgX = diff_X/ len(nearBirds)
avgY = diff_Y/ len(nearBirds)
avgZ = diff_Z/ len(nearBirds)
self.VelocityX = self.VelocityX - (avgX / 100)
self.VelocityY = self.VelocityY - (avgY / 100)
self.VelocityZ = self.VelocityZ - (avgZ / 100)
def matchVelocity(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + otherBird.VelocityX
diff_Y = diff_Y + otherBird.VelocityY
diff_Z = diff_Z + otherBird.VelocityZ
avgX = diff_X / len(nearBirds)
avgY = diff_Y / len(nearBirds)
avgZ = diff_Z / len(nearBirds)
self.VelocityX = self.VelocityX + (avgX / 40)
self.VelocityY = self.VelocityY + (avgY / 40)
self.VelocityZ = self.VelocityZ + (avgZ / 40)
import math
import rhinoscriptsyntax as rs
class Bird():
def __init__(self):
self.X = random.randint(0, 50)
self.Y = random.randint(0, 50)
self.Z = random.randint(0, 100)
self.VelocityX = random.randint(1,20) / 10.0
self.VelocityY = random.randint(1,20) / 10.0
self.VelocityZ = random.randint(1,20) / 10.0
self.MaxVelocity = 5
def drawBird(self):
point = [self.X, self.Y, self.Z]
rs.AddPoint(point)
def getDistance(self, otherBird):
distX = self.X - otherBird.X
distY = self.Y - otherBird.Y
distZ = self.Z - otherBird.Z
result = math.sqrt(distX * distX + distY * distY + distZ * distZ)
return result
def stayClose(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + (self.X - otherBird.X)
diff_Y = diff_Y + (self.Y - otherBird.Y)
diff_Z = diff_Z + (self.Z - otherBird.Z)
avgX = diff_X/ len(nearBirds)
avgY = diff_Y/ len(nearBirds)
avgZ = diff_Z/ len(nearBirds)
self.VelocityX = self.VelocityX - (avgX / 100)
self.VelocityY = self.VelocityY - (avgY / 100)
self.VelocityZ = self.VelocityZ - (avgZ / 100)
def matchVelocity(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + otherBird.VelocityX
diff_Y = diff_Y + otherBird.VelocityY
diff_Z = diff_Z + otherBird.VelocityZ
avgX = diff_X / len(nearBirds)
avgY = diff_Y / len(nearBirds)
avgZ = diff_Z / len(nearBirds)
self.VelocityX = self.VelocityX + (avgX / 40)
self.VelocityY = self.VelocityY + (avgY / 40)
self.VelocityZ = self.VelocityZ + (avgZ / 40)
def avoidCollision(self, nearBirds):
distanceX = 0
distanceY = 0
distanceZ = 0
minDistance = 30
for otherBird in nearBirds:
distance = self.getDistance(otherBird)
if distance < minDistance:
diff_X = (self.X - otherBird.X)
if diff_X >= 0:
diff_X = math.sqrt(minDistance) - diff_X
else:
diff_X = -math.sqrt(minDistance) - diff_X
distanceX = distanceX + diff_X
diff_Y = (self.Y - otherBird.Y)
if diff_Y >= 0:
diff_Y = math.sqrt(minDistance) - diff_Y
else:
diff_Y = -math.sqrt(minDistance) - diff_Y
distanceY = distanceY + diff_Y
diff_Z = (self.Z - otherBird.Z)
if diff_Z >= 0:
diff_Z = math.sqrt(minDistance) - diff_Z
else:
diff_Z = -math.sqrt(minDistance) - diff_Z
distanceZ = distanceZ + diff_Z
self.VelocityX = self.VelocityX - (distanceX / 5)
self.VelocityY = self.VelocityY - (distanceY / 5)
self.VelocityZ = self.VelocityZ - (distanceZ / 5)
def updatePosition(self):
self.X = self.X + self.VelocityX
self.Y = self.Y + self.VelocityY
self.Z = self.Z + self.VelocityZ
pos = rs.AddPoint(self.X, self.Y, self.Z)
return pos
def checkMaxVelocity(self):
velocityConditionX = abs(self.VelocityX) > self.MaxVelocity
velocityConditionY = abs(self.VelocityY) > self.MaxVelocity
velocityConditionZ = abs(self.VelocityZ) > self.MaxVelocity
if velocityConditionX or velocityConditionY or velocityConditionZ:
maxValue = max(abs(self.VelocityX), abs(self.VelocityY), abs(self.VelocityZ))
scaleFactor = self.MaxVelocity / maxValue
self.VelocityX = self.VelocityX * scaleFactor
self.VelocityY = self.VelocityY * scaleFactor
self.VelocityZ = self.VelocityZ * scaleFactor
def checkBounds(self):
boundX = 50
boundY = 50
boundZ = 100
if self.X < 0 and self.VelocityX < 0:
self.VelocityX = -self.VelocityX
if self.X > boundX and self.VelocityX > 0:
self.VelocityX = -self.VelocityX
if self.Y < 0 and self.VelocityY < 0:
self.VelocityY = -self.VelocityY
if self.Y > boundY and self.VelocityY > 0:
self.VelocityY = -self.VelocityY
if self.Z < 0 and self.VelocityZ < 0:
self.VelocityZ = -self.VelocityZ
if self.Z > boundZ and self.VelocityZ > 0:
self.VelocityZ = -self.VelocityZ
def updateBird(self, NearBirds):
self.stayClose(NearBirds)
self.matchVelocity(NearBirds)
self.avoidCollision(NearBirds)
self.checkBounds();
self.checkMaxVelocity()
point = self.updatePosition()
self.drawBird()
return point
class Flock():
def __init__(self):
self.AllBirds = []
self.NearBirds = []
self.NumBirds = 10
self.Repeat = 100
def generateInitialBirds(self):
for i in range(self.NumBirds):
b = Bird()
self.AllBirds.append(b)
def runFlocking(self):
for bird in self.AllBirds:
BirdPath = []
for i in range(self.Repeat):
self.findNearBirds(bird)
pathPoint = bird.updateBird(self.NearBirds)
self.findNearBirds(bird)
pathPoint = bird.updateBird(self.NearBirds)
BirdPath.append(pathPoint)
Path = rs.AddCurve(BirdPath)
randSize = random.uniform(.25,2)
pipe = rs.AddPipe(Path,0,randSize,1,2)
r = random.randint(0,255)
g = random.randint(0,255)
b = random.randint(0,255)
rs.ObjectColor(pipe, (r,g,b))
Path = rs.AddCurve(BirdPath)
randSize = random.uniform(.25,2)
pipe = rs.AddPipe(Path,0,randSize,1,2)
r = random.randint(0,255)
g = random.randint(0,255)
b = random.randint(0,255)
rs.ObjectColor(pipe, (r,g,b))
def findNearBirds(self, bird):
self.NearBirds = []
for newBird in self.AllBirds:
self.NearBirds = []
for newBird in self.AllBirds:
if bird == newBird:
pass
pass
else:
distance = bird.getDistance(newBird)
if distance < 600:
self.NearBirds.append(newBird)
distance = bird.getDistance(newBird)
if distance < 600:
self.NearBirds.append(newBird)
else:
pass
pass
def main(self):
self.generateInitialBirds()
self.runFlocking()
f = Flock()
f.main()
self.generateInitialBirds()
self.runFlocking()
f = Flock()
f.main()
import random
import math
import rhinoscriptsyntax as rs
import math
import rhinoscriptsyntax as rs
random.seed(1)
class Bird():
def __init__(self):
self.X = random.randint(0, 50)
self.Y = random.randint(0, 50)
self.Z = random.randint(0, 100)
self.VelocityX = random.randint(1,20) / 10.0
self.VelocityY = random.randint(1,20) / 10.0
self.VelocityZ = random.randint(1,20) / 10.0
self.MaxVelocity = 5
def __init__(self):
self.X = random.randint(0, 50)
self.Y = random.randint(0, 50)
self.Z = random.randint(0, 100)
self.VelocityX = random.randint(1,20) / 10.0
self.VelocityY = random.randint(1,20) / 10.0
self.VelocityZ = random.randint(1,20) / 10.0
self.MaxVelocity = 5
def drawBird(self):
point = [self.X, self.Y, self.Z]
pts = rs.AddPoint(point)
def getDistance(self, otherBird):
distX = self.X - otherBird.X
distY = self.Y - otherBird.Y
distZ = self.Z - otherBird.Z
result = math.sqrt(distX * distX + distY * distY + distZ * distZ)
return result
def stayClose(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + (self.X - otherBird.X)
diff_Y = diff_Y + (self.Y - otherBird.Y)
diff_Z = diff_Z + (self.Z - otherBird.Z)
avgX = diff_X/ len(nearBirds)
avgY = diff_Y/ len(nearBirds)
avgZ = diff_Z/ len(nearBirds)
self.VelocityX = self.VelocityX - (avgX / 100)
self.VelocityY = self.VelocityY - (avgY / 100)
self.VelocityZ = self.VelocityZ - (avgZ / 100)
def matchVelocity(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + otherBird.VelocityX
diff_Y = diff_Y + otherBird.VelocityY
diff_Z = diff_Z + otherBird.VelocityZ
avgX = diff_X / len(nearBirds)
avgY = diff_Y / len(nearBirds)
avgZ = diff_Z / len(nearBirds)
self.VelocityX = self.VelocityX + (avgX / 40)
self.VelocityY = self.VelocityY + (avgY / 40)
self.VelocityZ = self.VelocityZ + (avgZ / 40)
point = [self.X, self.Y, self.Z]
pts = rs.AddPoint(point)
def getDistance(self, otherBird):
distX = self.X - otherBird.X
distY = self.Y - otherBird.Y
distZ = self.Z - otherBird.Z
result = math.sqrt(distX * distX + distY * distY + distZ * distZ)
return result
def stayClose(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + (self.X - otherBird.X)
diff_Y = diff_Y + (self.Y - otherBird.Y)
diff_Z = diff_Z + (self.Z - otherBird.Z)
avgX = diff_X/ len(nearBirds)
avgY = diff_Y/ len(nearBirds)
avgZ = diff_Z/ len(nearBirds)
self.VelocityX = self.VelocityX - (avgX / 100)
self.VelocityY = self.VelocityY - (avgY / 100)
self.VelocityZ = self.VelocityZ - (avgZ / 100)
def matchVelocity(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + otherBird.VelocityX
diff_Y = diff_Y + otherBird.VelocityY
diff_Z = diff_Z + otherBird.VelocityZ
avgX = diff_X / len(nearBirds)
avgY = diff_Y / len(nearBirds)
avgZ = diff_Z / len(nearBirds)
self.VelocityX = self.VelocityX + (avgX / 40)
self.VelocityY = self.VelocityY + (avgY / 40)
self.VelocityZ = self.VelocityZ + (avgZ / 40)
def avoidCollision(self, nearBirds):
distanceX = 0
distanceY = 0
distanceZ = 0
minDistance = 30
for otherBird in nearBirds:
distance = self.getDistance(otherBird)
if distance < minDistance:
diff_X = (self.X - otherBird.X)
if diff_X >= 0:
diff_X = math.sqrt(minDistance) - diff_X
else:
diff_X = -math.sqrt(minDistance) - diff_X
distanceX = distanceX + diff_X
diff_Y = (self.Y - otherBird.Y)
if diff_Y >= 0:
diff_Y = math.sqrt(minDistance) - diff_Y
else:
diff_Y = -math.sqrt(minDistance) - diff_Y
distanceY = distanceY + diff_Y
diff_Z = (self.Z - otherBird.Z)
if diff_Z >= 0:
diff_Z = math.sqrt(minDistance) - diff_Z
else:
diff_Z = -math.sqrt(minDistance) - diff_Z
distanceZ = distanceZ + diff_Z
self.VelocityX = self.VelocityX - (distanceX / 5)
self.VelocityY = self.VelocityY - (distanceY / 5)
self.VelocityZ = self.VelocityZ - (distanceZ / 5)
distanceX = 0
distanceY = 0
distanceZ = 0
minDistance = 30
for otherBird in nearBirds:
distance = self.getDistance(otherBird)
if distance < minDistance:
diff_X = (self.X - otherBird.X)
if diff_X >= 0:
diff_X = math.sqrt(minDistance) - diff_X
else:
diff_X = -math.sqrt(minDistance) - diff_X
distanceX = distanceX + diff_X
diff_Y = (self.Y - otherBird.Y)
if diff_Y >= 0:
diff_Y = math.sqrt(minDistance) - diff_Y
else:
diff_Y = -math.sqrt(minDistance) - diff_Y
distanceY = distanceY + diff_Y
diff_Z = (self.Z - otherBird.Z)
if diff_Z >= 0:
diff_Z = math.sqrt(minDistance) - diff_Z
else:
diff_Z = -math.sqrt(minDistance) - diff_Z
distanceZ = distanceZ + diff_Z
self.VelocityX = self.VelocityX - (distanceX / 5)
self.VelocityY = self.VelocityY - (distanceY / 5)
self.VelocityZ = self.VelocityZ - (distanceZ / 5)
def updatePosition(self):
self.X = self.X + self.VelocityX
self.Y = self.Y + self.VelocityY
self.Z = self.Z + self.VelocityZ
pos = rs.AddPoint(self.X, self.Y, self.Z)
return pos
self.X = self.X + self.VelocityX
self.Y = self.Y + self.VelocityY
self.Z = self.Z + self.VelocityZ
pos = rs.AddPoint(self.X, self.Y, self.Z)
return pos
def checkMaxVelocity(self):
velocityConditionX = abs(self.VelocityX) > self.MaxVelocity
velocityConditionY = abs(self.VelocityY) > self.MaxVelocity
velocityConditionZ = abs(self.VelocityZ) > self.MaxVelocity
if velocityConditionX or velocityConditionY or velocityConditionZ:
maxValue = max(abs(self.VelocityX), abs(self.VelocityY), abs(self.VelocityZ))
scaleFactor = self.MaxVelocity / maxValue
self.VelocityX = self.VelocityX * scaleFactor
self.VelocityY = self.VelocityY * scaleFactor
self.VelocityZ = self.VelocityZ * scaleFactor
def checkBounds(self):
boundX = 10
boundY = 10
boundZ = 50
if self.X < 0 and self.VelocityX < 0:
self.VelocityX = -self.VelocityX
if self.X > boundX and self.VelocityX > 0:
self.VelocityX = -self.VelocityX
if self.Y < 0 and self.VelocityY < 0:
self.VelocityY = -self.VelocityY
if self.Y > boundY and self.VelocityY > 0:
self.VelocityY = -self.VelocityY
if self.Z < 0 and self.VelocityZ < 0:
self.VelocityZ = -self.VelocityZ
if self.Z > boundZ and self.VelocityZ > 0:
self.VelocityZ = -self.VelocityZ
def updateBird(self, NearBirds):
self.stayClose(NearBirds)
self.matchVelocity(NearBirds)
self.avoidCollision(NearBirds)
self.checkBounds();
self.checkMaxVelocity()
point = self.updatePosition()
self.drawBird()
return point
class Flock():
def __init__(self, input):
self.AllBirds = []
self.NearBirds = []
self.NumBirds = input
self.Repeat = 50
self.crvList = []
def generateInitialBirds(self):
for i in range(self.NumBirds):
b = Bird()
self.AllBirds.append(b)
def runFlocking(self):
for bird in self.AllBirds:
BirdPath = []
for i in range(self.Repeat):
self.findNearBirds(bird)
pathPoint = bird.updateBird(self.NearBirds)
BirdPath.append(pathPoint)
Path = rs.AddCurve(BirdPath)
self.crvList.append(Path)
def findNearBirds(self, bird):
self.NearBirds = []
for newBird in self.AllBirds:
if bird == newBird:
pass
else:
distance = bird.getDistance(newBird)
if distance < 600:
self.NearBirds.append(newBird)
else:
pass
def main(self):
self.generateInitialBirds()
self.runFlocking()
input = rs.GetInteger("input number of curves")
velocityConditionX = abs(self.VelocityX) > self.MaxVelocity
velocityConditionY = abs(self.VelocityY) > self.MaxVelocity
velocityConditionZ = abs(self.VelocityZ) > self.MaxVelocity
if velocityConditionX or velocityConditionY or velocityConditionZ:
maxValue = max(abs(self.VelocityX), abs(self.VelocityY), abs(self.VelocityZ))
scaleFactor = self.MaxVelocity / maxValue
self.VelocityX = self.VelocityX * scaleFactor
self.VelocityY = self.VelocityY * scaleFactor
self.VelocityZ = self.VelocityZ * scaleFactor
def checkBounds(self):
boundX = 10
boundY = 10
boundZ = 50
if self.X < 0 and self.VelocityX < 0:
self.VelocityX = -self.VelocityX
if self.X > boundX and self.VelocityX > 0:
self.VelocityX = -self.VelocityX
if self.Y < 0 and self.VelocityY < 0:
self.VelocityY = -self.VelocityY
if self.Y > boundY and self.VelocityY > 0:
self.VelocityY = -self.VelocityY
if self.Z < 0 and self.VelocityZ < 0:
self.VelocityZ = -self.VelocityZ
if self.Z > boundZ and self.VelocityZ > 0:
self.VelocityZ = -self.VelocityZ
def updateBird(self, NearBirds):
self.stayClose(NearBirds)
self.matchVelocity(NearBirds)
self.avoidCollision(NearBirds)
self.checkBounds();
self.checkMaxVelocity()
point = self.updatePosition()
self.drawBird()
return point
class Flock():
def __init__(self, input):
self.AllBirds = []
self.NearBirds = []
self.NumBirds = input
self.Repeat = 50
self.crvList = []
def generateInitialBirds(self):
for i in range(self.NumBirds):
b = Bird()
self.AllBirds.append(b)
def runFlocking(self):
for bird in self.AllBirds:
BirdPath = []
for i in range(self.Repeat):
self.findNearBirds(bird)
pathPoint = bird.updateBird(self.NearBirds)
BirdPath.append(pathPoint)
Path = rs.AddCurve(BirdPath)
self.crvList.append(Path)
def findNearBirds(self, bird):
self.NearBirds = []
for newBird in self.AllBirds:
if bird == newBird:
pass
else:
distance = bird.getDistance(newBird)
if distance < 600:
self.NearBirds.append(newBird)
else:
pass
def main(self):
self.generateInitialBirds()
self.runFlocking()
input = rs.GetInteger("input number of curves")
f = Flock(input)
f.main()
f.main()
obj1 = rs.GetObjects("select curves")
rs.AddLoftSrf(obj1)
rs.AddLoftSrf(obj1)
import random
import math
import rhinoscriptsyntax as rs
class Bird():
def __init__(self):
self.X = random.randint(0, 50)
self.Y = random.randint(0, 50)
self.Z = random.randint(0, 100)
self.VelocityX = random.randint(1,20) / 10.0
self.VelocityY = random.randint(1,20) / 10.0
self.VelocityZ = random.randint(1,20) / 10.0
self.MaxVelocity = 5
def drawBird(self):
point = [self.X, self.Y, self.Z]
pts = rs.AddPoint(point)
rs.AddSphere(pts,1)
def getDistance(self, otherBird):
distX = self.X - otherBird.X
distY = self.Y - otherBird.Y
distZ = self.Z - otherBird.Z
result = math.sqrt(distX * distX + distY *
distY + distZ * distZ)
return result
def stayClose(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + (self.X - otherBird.X)
diff_Y = diff_Y + (self.Y - otherBird.Y)
diff_Z = diff_Z + (self.Z - otherBird.Z)
avgX = diff_X/ len(nearBirds)
avgY = diff_Y/ len(nearBirds)
avgZ = diff_Z/ len(nearBirds)
self.VelocityX = self.VelocityX - (avgX / 100)
self.VelocityY = self.VelocityY - (avgY / 100)
self.VelocityZ = self.VelocityZ - (avgZ / 100)
def matchVelocity(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + otherBird.VelocityX
diff_Y = diff_Y + otherBird.VelocityY
diff_Z = diff_Z + otherBird.VelocityZ
avgX = diff_X / len(nearBirds)
avgY = diff_Y / len(nearBirds)
avgZ = diff_Z / len(nearBirds)
self.VelocityX = self.VelocityX + (avgX / 40)
self.VelocityY = self.VelocityY + (avgY / 40)
self.VelocityZ = self.VelocityZ + (avgZ / 40)
def avoidCollision(self, nearBirds):
distanceX = 0
distanceY = 0
distanceZ = 0
minDistance = 30
for otherBird in nearBirds:
distance = self.getDistance(otherBird)
if distance < minDistance:
diff_X = (self.X - otherBird.X)
if diff_X >= 0:
diff_X = math.sqrt(minDistance) - diff_X
else:
diff_X = -math.sqrt(minDistance) - diff_X
distanceX = distanceX + diff_X
diff_Y = (self.Y - otherBird.Y)
if diff_Y >= 0:
diff_Y = math.sqrt(minDistance) - diff_Y
else:
diff_Y = -math.sqrt(minDistance) - diff_Y
distanceY = distanceY + diff_Y
diff_Z = (self.Z - otherBird.Z)
if diff_Z >= 0:
diff_Z = math.sqrt(minDistance) - diff_Z
else:
diff_Z = -math.sqrt(minDistance) - diff_Z
distanceZ = distanceZ + diff_Z
self.VelocityX = self.VelocityX - (distanceX / 5)
self.VelocityY = self.VelocityY - (distanceY / 5)
self.VelocityZ = self.VelocityZ - (distanceZ / 5)
def updatePosition(self):
self.X = self.X + self.VelocityX
self.Y = self.Y + self.VelocityY
self.Z = self.Z + self.VelocityZ
pos = rs.AddPoint(self.X, self.Y, self.Z)
return pos
def checkMaxVelocity(self):
velocityConditionX = abs(self.VelocityX) > self.MaxVelocity
velocityConditionY = abs(self.VelocityY) > self.MaxVelocity
velocityConditionZ = abs(self.VelocityZ) > self.MaxVelocity
if velocityConditionX or velocityConditionY or velocityConditionZ:
maxValue = max(abs(self.VelocityX),
abs(self.VelocityY), abs(self.VelocityZ))
scaleFactor = self.MaxVelocity / maxValue
self.VelocityX = self.VelocityX * scaleFactor
self.VelocityY = self.VelocityY * scaleFactor
self.VelocityZ = self.VelocityZ * scaleFactor
def checkBounds(self):
boundX = 50
boundY = 50
boundZ = 100
if self.X < 0 and self.VelocityX < 0:
self.VelocityX = -self.VelocityX
if self.X > boundX and self.VelocityX > 0:
self.VelocityX = -self.VelocityX
if self.Y < 0 and self.VelocityY < 0:
self.VelocityY = -self.VelocityY
if self.Y > boundY and self.VelocityY > 0:
self.VelocityY = -self.VelocityY
if self.Z < 0 and self.VelocityZ < 0:
self.VelocityZ = -self.VelocityZ
if self.Z > boundZ and self.VelocityZ > 0:
self.VelocityZ = -self.VelocityZ
def updateBird(self, NearBirds):
self.stayClose(NearBirds)
self.matchVelocity(NearBirds)
self.avoidCollision(NearBirds)
self.checkBounds();
self.checkMaxVelocity()
point = self.updatePosition()
self.drawBird()
return point
class Flock():
def __init__(self):
self.AllBirds = []
self.NearBirds = []
self.NumBirds = 15
self.Repeat = 50
def generateInitialBirds(self):
for i in range(self.NumBirds):
b = Bird()
self.AllBirds.append(b)
def runFlocking(self):
for bird in self.AllBirds:
BirdPath = []
for i in range(self.Repeat):
self.findNearBirds(bird)
pathPoint = bird.updateBird(self.NearBirds)
BirdPath.append(pathPoint)
Path = rs.AddCurve(BirdPath,2)
rs.AddPipe(Path,0,.5,1,2)
def findNearBirds(self, bird):
self.NearBirds = []
for newBird in self.AllBirds:
if bird == newBird:
pass
else:
distance = bird.getDistance(newBird)
if distance < 600:
self.NearBirds.append(newBird)
else:
pass
def main(self):
self.generateInitialBirds()
self.runFlocking()
f = Flock()
f.main()

import random
import math
import rhinoscriptsyntax as rs
class Bird():
def __init__(self):
self.X = random.randint(0, 50)
self.Y = random.randint(0, 50)
self.Z = random.randint(0, 100)
self.VelocityX = random.randint(1,20) / 10.0
self.VelocityY = random.randint(1,20) / 10.0
self.VelocityZ = random.randint(1,20) / 10.0
self.MaxVelocity = 5
def drawBird(self):
point = [self.X, self.Y, self.Z]
rs.AddPoint(point)
def getDistance(self, otherBird):
distX = self.X - otherBird.X
distY = self.Y - otherBird.Y
distZ = self.Z - otherBird.Z
result = math.sqrt(distX * distX + distY * distY + distZ * distZ)
return result
def stayClose(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + (self.X - otherBird.X)
diff_Y = diff_Y + (self.Y - otherBird.Y)
diff_Z = diff_Z + (self.Z - otherBird.Z)
avgX = diff_X/ len(nearBirds)
avgY = diff_Y/ len(nearBirds)
avgZ = diff_Z/ len(nearBirds)
self.VelocityX = self.VelocityX - (avgX / 100)
self.VelocityY = self.VelocityY - (avgY / 100)
self.VelocityZ = self.VelocityZ - (avgZ / 100)
def matchVelocity(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + otherBird.VelocityX
diff_Y = diff_Y + otherBird.VelocityY
diff_Z = diff_Z + otherBird.VelocityZ
avgX = diff_X / len(nearBirds)
avgY = diff_Y / len(nearBirds)
avgZ = diff_Z / len(nearBirds)
self.VelocityX = self.VelocityX + (avgX / 40)
self.VelocityY = self.VelocityY + (avgY / 40)
self.VelocityZ = self.VelocityZ + (avgZ / 40)
def avoidCollision(self, nearBirds):
distanceX = 0
distanceY = 0
distanceZ = 0
minDistance = 30
for otherBird in nearBirds:
distance = self.getDistance(otherBird)
if distance < minDistance:
diff_X = (self.X - otherBird.X)
if diff_X >= 0:
diff_X = math.sqrt(minDistance) - diff_X
else:
diff_X = -math.sqrt(minDistance) - diff_X
distanceX = distanceX + diff_X
diff_Y = (self.Y - otherBird.Y)
if diff_Y >= 0:
diff_Y = math.sqrt(minDistance) - diff_Y
else:
diff_Y = -math.sqrt(minDistance) - diff_Y
distanceY = distanceY + diff_Y
diff_Z = (self.Z - otherBird.Z)
if diff_Z >= 0:
diff_Z = math.sqrt(minDistance) - diff_Z
else:
diff_Z = -math.sqrt(minDistance) - diff_Z
distanceZ = distanceZ + diff_Z
self.VelocityX = self.VelocityX - (distanceX / 5)
self.VelocityY = self.VelocityY - (distanceY / 5)
self.VelocityZ = self.VelocityZ - (distanceZ / 5)
def updatePosition(self):
self.X = self.X + self.VelocityX
self.Y = self.Y + self.VelocityY
self.Z = self.Z + self.VelocityZ
pos = rs.AddPoint(self.X, self.Y, self.Z)
return pos
import math
import rhinoscriptsyntax as rs
class Bird():
def __init__(self):
self.X = random.randint(0, 50)
self.Y = random.randint(0, 50)
self.Z = random.randint(0, 100)
self.VelocityX = random.randint(1,20) / 10.0
self.VelocityY = random.randint(1,20) / 10.0
self.VelocityZ = random.randint(1,20) / 10.0
self.MaxVelocity = 5
def drawBird(self):
point = [self.X, self.Y, self.Z]
rs.AddPoint(point)
def getDistance(self, otherBird):
distX = self.X - otherBird.X
distY = self.Y - otherBird.Y
distZ = self.Z - otherBird.Z
result = math.sqrt(distX * distX + distY * distY + distZ * distZ)
return result
def stayClose(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + (self.X - otherBird.X)
diff_Y = diff_Y + (self.Y - otherBird.Y)
diff_Z = diff_Z + (self.Z - otherBird.Z)
avgX = diff_X/ len(nearBirds)
avgY = diff_Y/ len(nearBirds)
avgZ = diff_Z/ len(nearBirds)
self.VelocityX = self.VelocityX - (avgX / 100)
self.VelocityY = self.VelocityY - (avgY / 100)
self.VelocityZ = self.VelocityZ - (avgZ / 100)
def matchVelocity(self, nearBirds):
diff_X = 0
diff_Y = 0
diff_Z = 0
avgX = 0
avgY = 0
avgZ = 0
for otherBird in nearBirds:
diff_X = diff_X + otherBird.VelocityX
diff_Y = diff_Y + otherBird.VelocityY
diff_Z = diff_Z + otherBird.VelocityZ
avgX = diff_X / len(nearBirds)
avgY = diff_Y / len(nearBirds)
avgZ = diff_Z / len(nearBirds)
self.VelocityX = self.VelocityX + (avgX / 40)
self.VelocityY = self.VelocityY + (avgY / 40)
self.VelocityZ = self.VelocityZ + (avgZ / 40)
def avoidCollision(self, nearBirds):
distanceX = 0
distanceY = 0
distanceZ = 0
minDistance = 30
for otherBird in nearBirds:
distance = self.getDistance(otherBird)
if distance < minDistance:
diff_X = (self.X - otherBird.X)
if diff_X >= 0:
diff_X = math.sqrt(minDistance) - diff_X
else:
diff_X = -math.sqrt(minDistance) - diff_X
distanceX = distanceX + diff_X
diff_Y = (self.Y - otherBird.Y)
if diff_Y >= 0:
diff_Y = math.sqrt(minDistance) - diff_Y
else:
diff_Y = -math.sqrt(minDistance) - diff_Y
distanceY = distanceY + diff_Y
diff_Z = (self.Z - otherBird.Z)
if diff_Z >= 0:
diff_Z = math.sqrt(minDistance) - diff_Z
else:
diff_Z = -math.sqrt(minDistance) - diff_Z
distanceZ = distanceZ + diff_Z
self.VelocityX = self.VelocityX - (distanceX / 5)
self.VelocityY = self.VelocityY - (distanceY / 5)
self.VelocityZ = self.VelocityZ - (distanceZ / 5)
def updatePosition(self):
self.X = self.X + self.VelocityX
self.Y = self.Y + self.VelocityY
self.Z = self.Z + self.VelocityZ
pos = rs.AddPoint(self.X, self.Y, self.Z)
return pos
def checkMaxVelocity(self):
velocityConditionX = abs(self.VelocityX) > self.MaxVelocity
velocityConditionY = abs(self.VelocityY) > self.MaxVelocity
velocityConditionZ = abs(self.VelocityZ) > self.MaxVelocity
if velocityConditionX or velocityConditionY or velocityConditionZ:
maxValue = max(abs(self.VelocityX), abs(self.VelocityY), abs(self.VelocityZ))
scaleFactor = self.MaxVelocity / maxValue
self.VelocityX = self.VelocityX * scaleFactor
self.VelocityY = self.VelocityY * scaleFactor
self.VelocityZ = self.VelocityZ * scaleFactor
rs.AddSphere([0,0,5], 10)
rs.AddSphere([40,0,5], 10)
rs.AddSphere([40,40,5], 10)
rs.AddSphere([0,40,5], 10)
rs.AddSphere([0,0,95], 10)
rs.AddSphere([40,0,95], 10)
rs.AddSphere([40,40,95], 10)
rs.AddSphere([0,40,95], 10)
velocityConditionX = abs(self.VelocityX) > self.MaxVelocity
velocityConditionY = abs(self.VelocityY) > self.MaxVelocity
velocityConditionZ = abs(self.VelocityZ) > self.MaxVelocity
if velocityConditionX or velocityConditionY or velocityConditionZ:
maxValue = max(abs(self.VelocityX), abs(self.VelocityY), abs(self.VelocityZ))
scaleFactor = self.MaxVelocity / maxValue
self.VelocityX = self.VelocityX * scaleFactor
self.VelocityY = self.VelocityY * scaleFactor
self.VelocityZ = self.VelocityZ * scaleFactor
def checkBounds(self):
boundX = 50
boundY = 50
boundZ = 100
if self.X < 0 and self.VelocityX < 0:
self.VelocityX = -self.VelocityX
if self.X > boundX and self.VelocityX > 0:
self.VelocityX = -self.VelocityX
if self.Y < 0 and self.VelocityY < 0:
self.VelocityY = -self.VelocityY
if self.Y > boundY and self.VelocityY > 0:
self.VelocityY = -self.VelocityY
if self.Z < 0 and self.VelocityZ < 0:
self.VelocityZ = -self.VelocityZ
if self.Z > boundZ and self.VelocityZ > 0:
self.VelocityZ = -self.VelocityZ
def updateBird(self, NearBirds):
self.stayClose(NearBirds)
self.matchVelocity(NearBirds)
self.avoidCollision(NearBirds)
self.checkBounds();
self.checkMaxVelocity()
point = self.updatePosition()
self.drawBird()
return point
class Flock():
def __init__(self):
self.AllBirds = []
self.NearBirds = []
self.NumBirds = 10
self.Repeat = 100
self.eList = []
self.oList = []
self.zList = []
self.yList = []
def generateInitialBirds(self):
for i in range(self.NumBirds):
b = Bird()
self.AllBirds.append(b)
def runFlocking(self):
for bird in self.AllBirds:
BirdPath = []
boundX = 50
boundY = 50
boundZ = 100
if self.X < 0 and self.VelocityX < 0:
self.VelocityX = -self.VelocityX
if self.X > boundX and self.VelocityX > 0:
self.VelocityX = -self.VelocityX
if self.Y < 0 and self.VelocityY < 0:
self.VelocityY = -self.VelocityY
if self.Y > boundY and self.VelocityY > 0:
self.VelocityY = -self.VelocityY
if self.Z < 0 and self.VelocityZ < 0:
self.VelocityZ = -self.VelocityZ
if self.Z > boundZ and self.VelocityZ > 0:
self.VelocityZ = -self.VelocityZ
def updateBird(self, NearBirds):
self.stayClose(NearBirds)
self.matchVelocity(NearBirds)
self.avoidCollision(NearBirds)
self.checkBounds();
self.checkMaxVelocity()
point = self.updatePosition()
self.drawBird()
return point
class Flock():
def __init__(self):
self.AllBirds = []
self.NearBirds = []
self.NumBirds = 10
self.Repeat = 100
self.eList = []
self.oList = []
self.zList = []
self.yList = []
def generateInitialBirds(self):
for i in range(self.NumBirds):
b = Bird()
self.AllBirds.append(b)
def runFlocking(self):
for bird in self.AllBirds:
BirdPath = []
for i in range(self.Repeat):
self.findNearBirds(bird)
pathPoint = bird.updateBird(self.NearBirds)
self.findNearBirds(bird)
pathPoint = bird.updateBird(self.NearBirds)
BirdPath.append(pathPoint)
for k in range(i):
pt = BirdPath[k]
if k%4 == 0:
self.eList.append(pt)
if k%4 == 1:
self.oList.append(pt)
if k%4 == 2:
self.zList.append(pt)
if k%4 == 3:
self.yList.append(pt)
eCrv = rs.AddCurve(self.eList)
rs.AddPipe(eCrv,0,.25,0,2)
oCrv = rs.AddCurve(self.oList)
rs.AddPipe(oCrv,0,.25,0,2)
zCrv = rs.AddCurve(self.zList)
rs.AddPipe(zCrv,0,.25,0,2)
yCrv = rs.AddCurve(self.zList)
rs.AddPipe(yCrv,0,.25,0,2)
def findNearBirds(self, bird):
self.NearBirds = []
for newBird in self.AllBirds:
for k in range(i):
pt = BirdPath[k]
if k%4 == 0:
self.eList.append(pt)
if k%4 == 1:
self.oList.append(pt)
if k%4 == 2:
self.zList.append(pt)
if k%4 == 3:
self.yList.append(pt)
eCrv = rs.AddCurve(self.eList)
rs.AddPipe(eCrv,0,.25,0,2)
oCrv = rs.AddCurve(self.oList)
rs.AddPipe(oCrv,0,.25,0,2)
zCrv = rs.AddCurve(self.zList)
rs.AddPipe(zCrv,0,.25,0,2)
yCrv = rs.AddCurve(self.zList)
rs.AddPipe(yCrv,0,.25,0,2)
def findNearBirds(self, bird):
self.NearBirds = []
for newBird in self.AllBirds:
if bird == newBird:
pass
pass
else:
distance = bird.getDistance(newBird)
if distance < 600:
self.NearBirds.append(newBird)
else:
pass
distance = bird.getDistance(newBird)
if distance < 600:
self.NearBirds.append(newBird)
else:
pass
def main(self):
self.generateInitialBirds()
self.runFlocking()
f = Flock()
f.main()
self.generateInitialBirds()
self.runFlocking()
f = Flock()
f.main()
rs.AddSphere([0,0,5], 10)
rs.AddSphere([40,0,5], 10)
rs.AddSphere([40,40,5], 10)
rs.AddSphere([0,40,5], 10)
rs.AddSphere([0,0,95], 10)
rs.AddSphere([40,0,95], 10)
rs.AddSphere([40,40,95], 10)
rs.AddSphere([0,40,95], 10)



