Unidentified Swimming Objects (USO) - Autonomous Underwater Vehicles
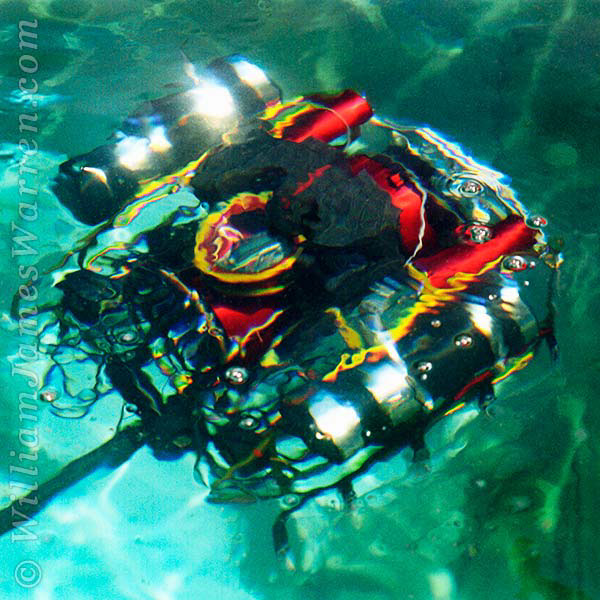
This project sent me back to my mis-spent youth, as the objects took on a stoned funhouse distortion through the water. They were only slightly easier to apprehend out of water, for the son of an engineer.
12th International Autonomous Underwater Vehicle Competition, SPAWAR Transducer Test Facility, San Diego, for the 12th International Autonomous Underwater Vehicle Competition, sponsored by the Association for Unmanned Vehicle Systems International (AUVSI) and the US Office of Naval Research. August 2, 2009.
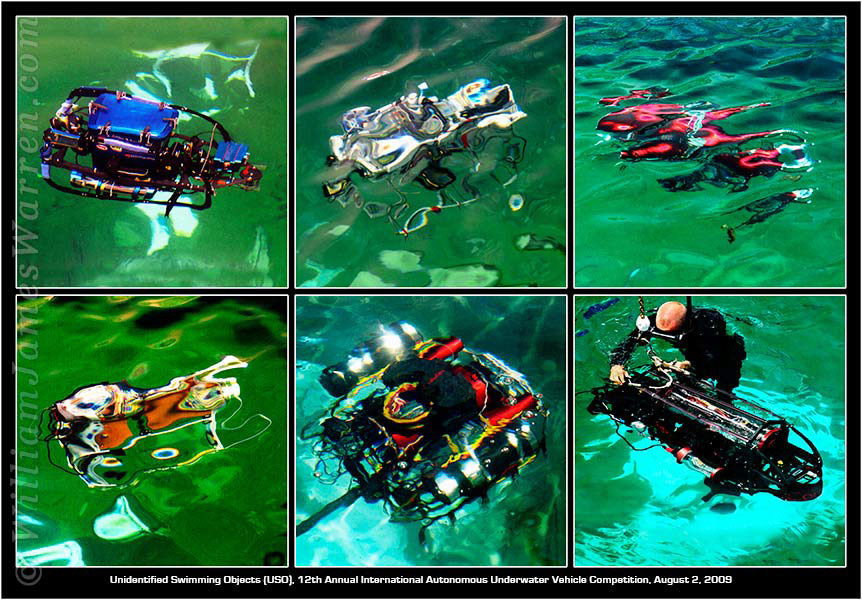
At lower right, a diver releases the Cornell University 2009 'Nova' Autonomous Underwater Vehicle at the outset of it's First Place winning trial, the only entry of over 30 to complete all the tasks of the mission. Other entries (Clockwise from the lower right) included: University of Southern California; Florida Atlantic University; (top row): Ecole de Technologie Superieure; University of Maryland; Kyushu Institute of Technology.
The mission is to "Create a submersible vehicle which, acting autonomously, (disconnected from human direction or control), will pass through the validation gate, follow a path, light a flare, pass under barb wire, 'take out' a machine gun nest, perform a bombing run, recover secret documents and surface on the rooftop."
I had to choose a favorite team to focus on and was particularly impressed with the Cornell kids and their businesslike approach, beautifully organized and coordinated. Their vehicle was a work of art, synthesis of form & function, adaptable to many missions.

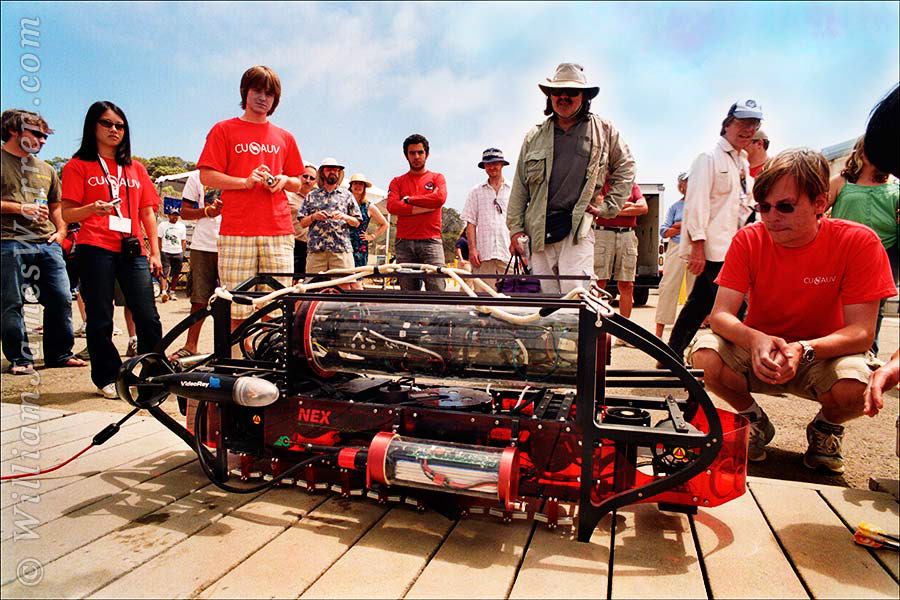
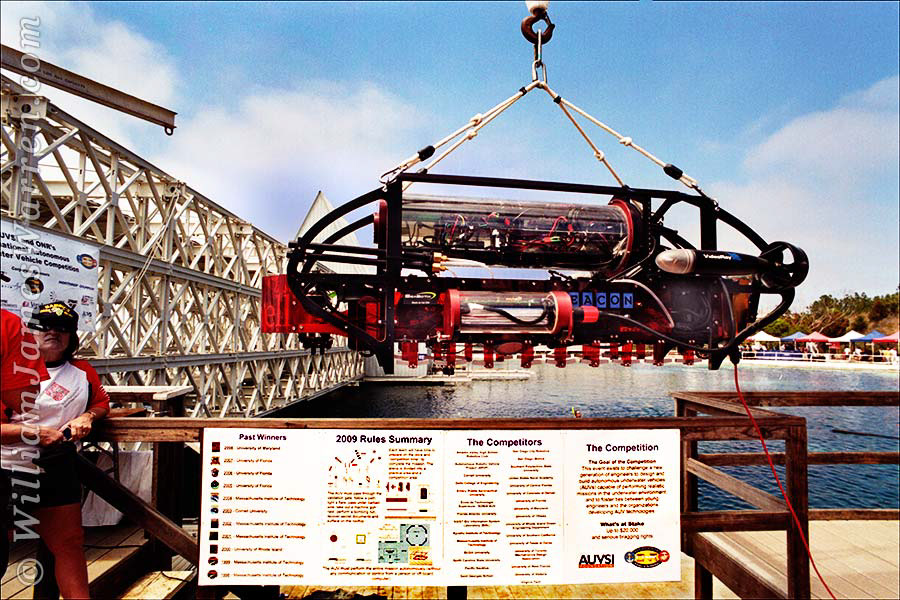
Weigh-In, Four Cornell team members tending their creation like mother hens.


The Cornell Team Leader holding her breath as her vehicle neared the finish line.


The Finish Line, or Finish Circle, taken in 2011.

Victory! The Cornell team's was the only entry of over thirty to accomplish all the mission tasks.

A couple more vehicles, these from 2011.


Most entries are equipped with a range of sensors, including: Doppler Velocity Logs, Acoustic Arrays, Cameras, Temperature, Altimeter, Compass, Inertial Measurement Unit & Pressure/Depth sensors. Data is transmitted to the onboard computer(s), which uses the information for vehicle control, the ability to respond to various obstacles and targets based on visual, acoustic, and positional information.
The AUVs are equipped with 'Effectors', or tools, with which to influence their environment, translate code into action: Actuators include thrusters which control the vehicle attitude & position, marker droppers, torpedo launchers and various Grapnel arrays.
The purpose of the competition: "Challenge a new generation of engineers to design and build autonomous underwater vehicles (AUVs) capable of performing realistic missions in the underwater environment, and to foster ties between young engineers and the organizations developing AUV technologies." More Info: http://www.auvsi.org
http://williamjameswarren.com/unidentified-swimming-objects-usos/

