Drawbot is a wireless pen plotter robot that has no work area limitations. This is unlike most pen plotters in both the open source community and the commercial sector. It is more broadly speaking an exploration into tetherless, free-roaming digital fabrication tools.
Potential applications of Drawbot include sail-making and road painting.
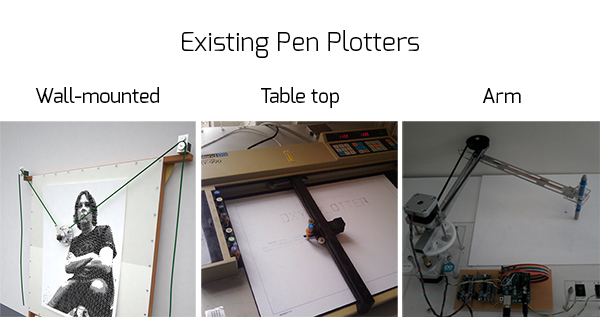
For the final project of my Physical Computing class, I was interested in using digital technology as a tool for making. I started with the intention of making a free-roaming/wireless drawing robot. While doing so I realised that I can get rather precise results with the stepper motors I had. I decided to look into pen plotters, which works with essentially the same logic of a 3D printer but with less sophisticated Z-axis movement.
Upon some research in both the open source community and in the commercial sector, I realized that I was making something new. All pen plotters have limited work areas because of how they work: they all move within a specifically-defined space in order to get precision. I decided to make one that is wireless and free-roaming.
Hardware
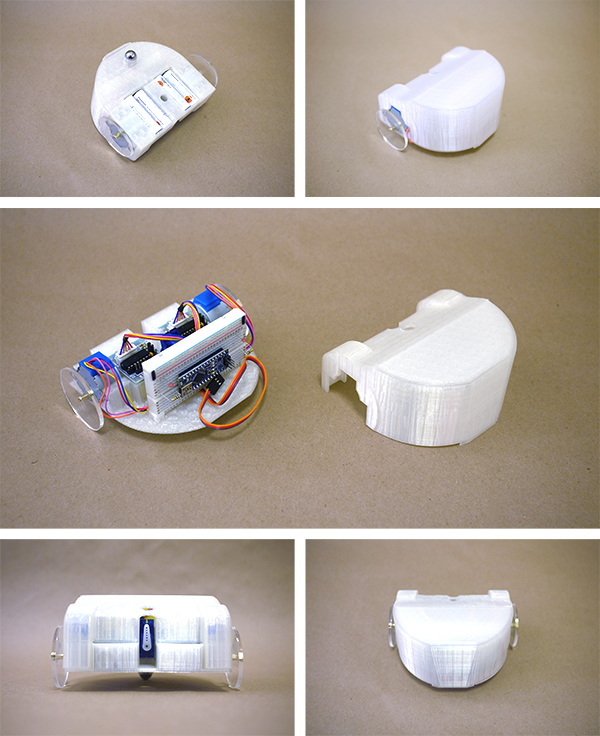
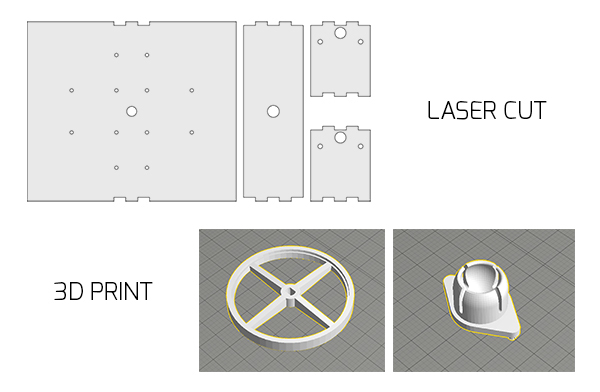
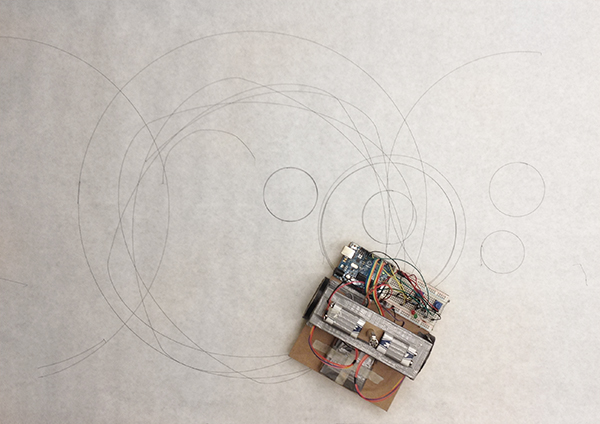
The wheels and caster is 3D printed on a Makerbot, the rest of the frame is laser cut masonite. Drawbot is run by an Arduino Uno.
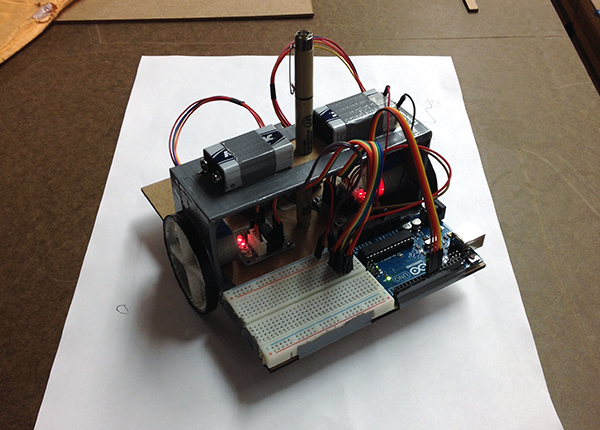
Drawbot right after assembly
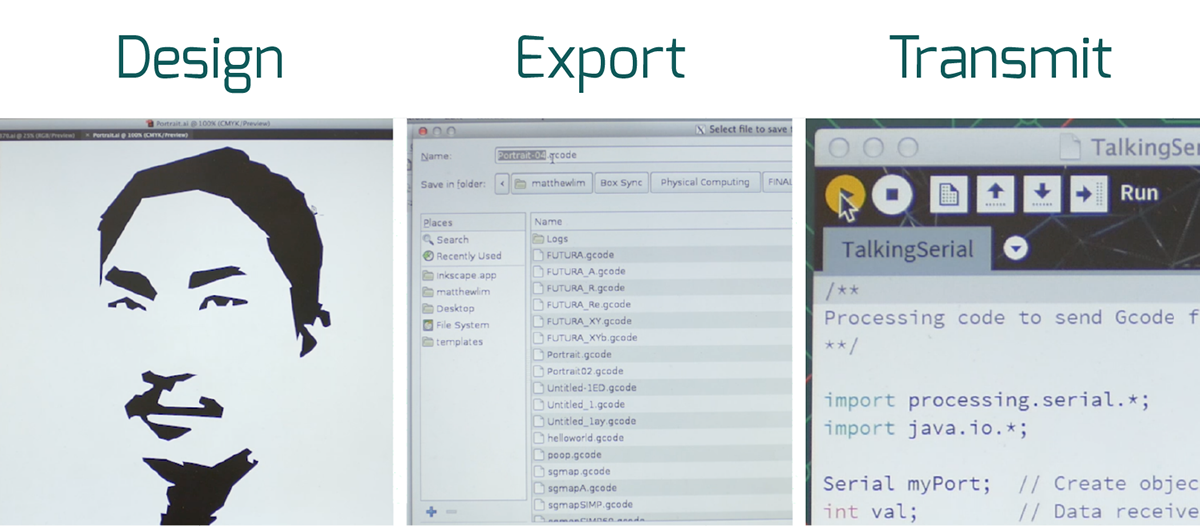
Software
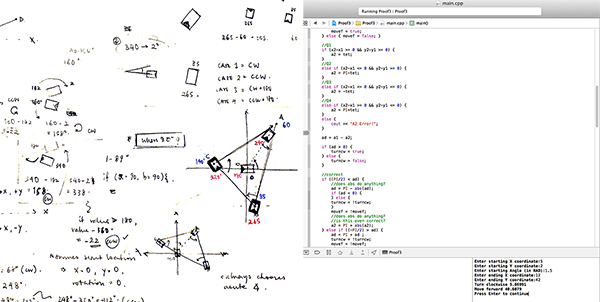
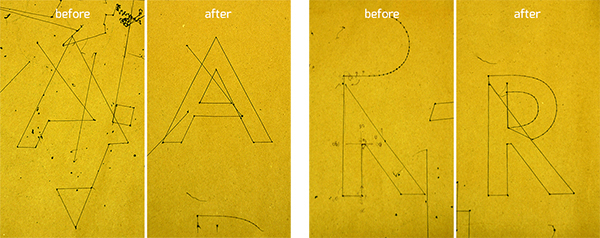
The software used for the Drawbot is based on open source code for TinyCNC by Makerblock. The arduino code had to be significantly modified because the Drawbot moves in a very different way compared to the TinyCNC. That involved trigonometry, some C++ and a lot of trial and error.
The software used for the Drawbot is based on open source code for TinyCNC by Makerblock. The arduino code had to be significantly modified because the Drawbot moves in a very different way compared to the TinyCNC. That involved trigonometry, some C++ and a lot of trial and error.
I am currently developing a second version chassis. The new frame has fully integrated assembly, which means that minimal hardware is required to put the robot together. I will also be making Drawbot open source by creating an instructable to share the platform and have others participate in its development.