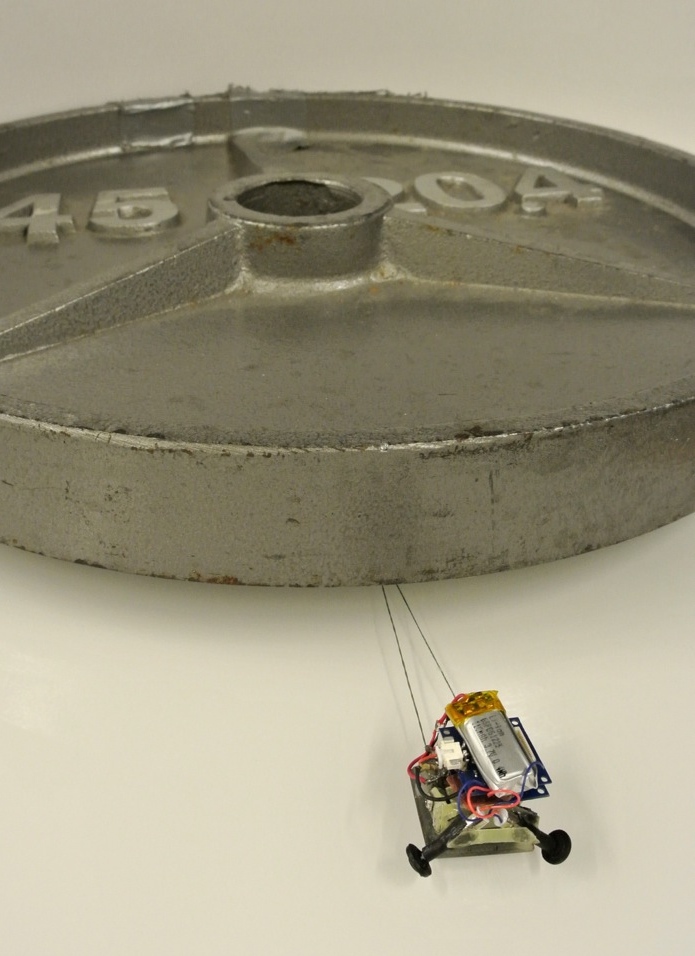
Created in collaboration with Stanford's Biomimetics and Dexterous Manipulation Lab (BDML), this micro-robot fits within one cubic inch and can drag objects 2,000x its size, like an ant. The robot is part of a BDML research project to better understand the controllable, directional, and reusable properties of gecko-inspired adhesives. Our findings were recently submitted to the International Conference on Robotics and Automation (ICRA) and are under review.
My contributions to the project include:
~ Programming the micro-robot on an Atmel 328 processor
~ Building custom rotation sensors & signal filters to control behaviors
~ Designing mechanical components of the robot, including a single degree of freedom winch and clutch transmission that engages/disengages the gecko adhesive
SolidWorks CAD Model:
- "Tail" allows robot to prop itself up and minimize friction while walking forward (shown in Purple)
- Mount facilitates precise and repeatable installation of motors, and also acts as a mechanical stop that determines the walking and tugging configurations (shown in Red)


Bird's Eye View

Close-Up View