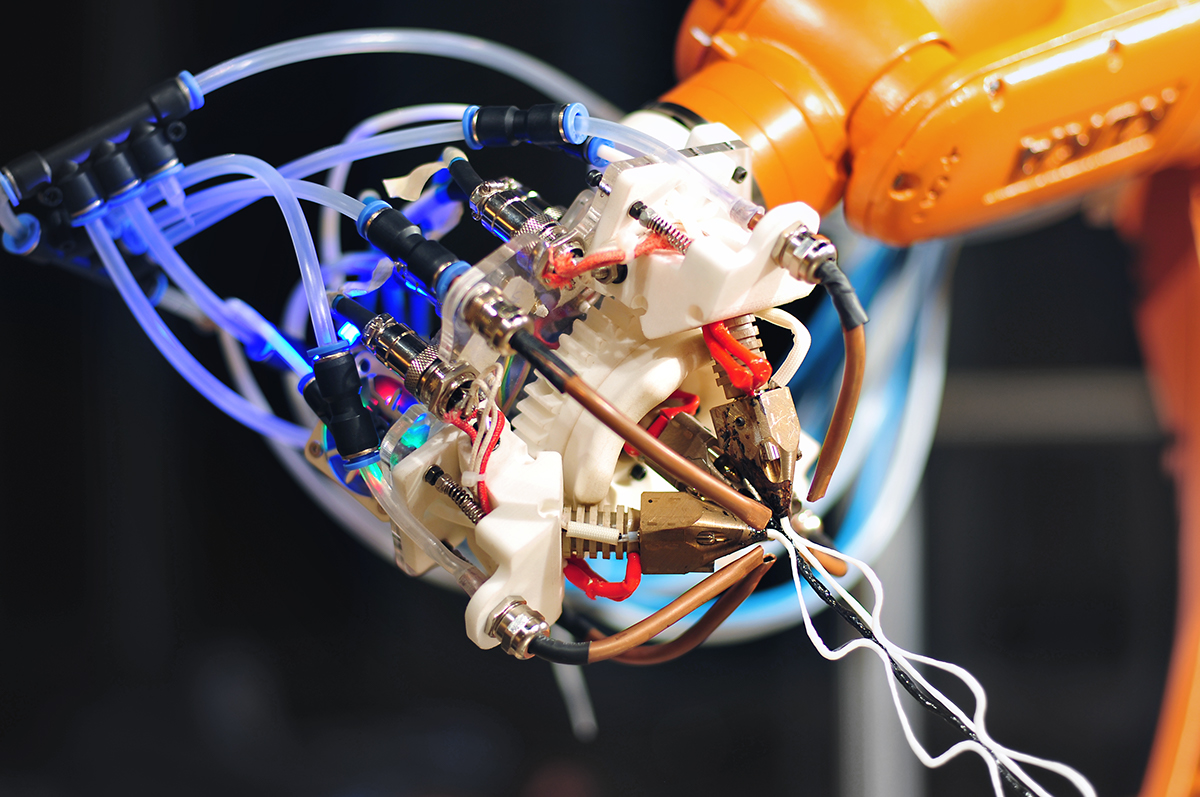
Robotic Extrusion: A printing head led by KUKA R900 produced self-supporting structure(ABS)

Robotic Extrusion: Whole System
........................................................................................................................................................................................................
ROBOTIC EXTRUSION
Research of Digital Craftsmanship & Autonomous Fabrication
The project, Robotic 6-Axis 3D Printing, is a highly-integrated installation combining robotics, 3D printing technique and interactive interface. It aims to provide the designer a digital method to eliminate the line between "Designing" and "Fabricating". In this case, architects provides more than just drawings and construction notes, however, they are capable of fabricating their work quickly and precisely by themselves.
Most of today's researches and applications of robotic fabrication are limited to replicating human labor and raising efficiency of manufacturing. However, in the project of Robotic 6-Axis 3D Printing, we developed a fabrication strategy learning and emulating the law of nature (referring to Chinese philosophy "师法自然 "). By studying the material and structure performance of 3D form in nature, we figured out a way to incorporate biomimetic fabrication strategy into 3D printing process. And by designing the special robotic-end effector (Tooling) and utilizing the great flexibility and accuracy of KUKA robotics, the biomimetic fabricating process has been fully realized.
The whole process embodied the concept of "Digital Crafsmanship", which emphasis the personality of designer and allows them to closely intergrated "Designing" and "Fabricating".
........................................................................................................................................................................................................


Whole Printing Process / Freeze Frames of the Movie
........................................................................................................................................................................................................
PHASE 01: BIOMIMETIC CONCEPT & SIMULATION
3D printing technology has great potential in future fabrication field, however, it is unconvincing to address it with the name of future craftsmanship. This manufacturing process has limitations in spatial flexibility and fails to perform a fabrication structural strategy. It is because the current 3D printing technology mostly relies on the superimposition of thermoplastic ABS/PLA material along direction of gravity.
Robotic 6-Axis 3D Printing project uses the same material (ABS) but has make a breakthrough in the way it prints. By mimicking the micro-structure of spider silk thread, a specific fabrication strategy has been added into this process. This change makes it possible to print simple self-supporting forms and is capable to show how the form grow from the ground. In this way, the material develops its full potential to expanded the materiality through the biomimetic printing progress.
........................................................................................................................................................................................................
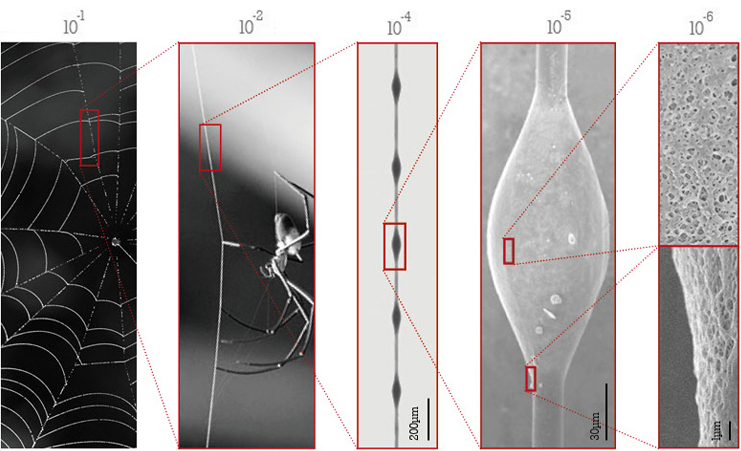
Structural Inspiration from Spider Thread
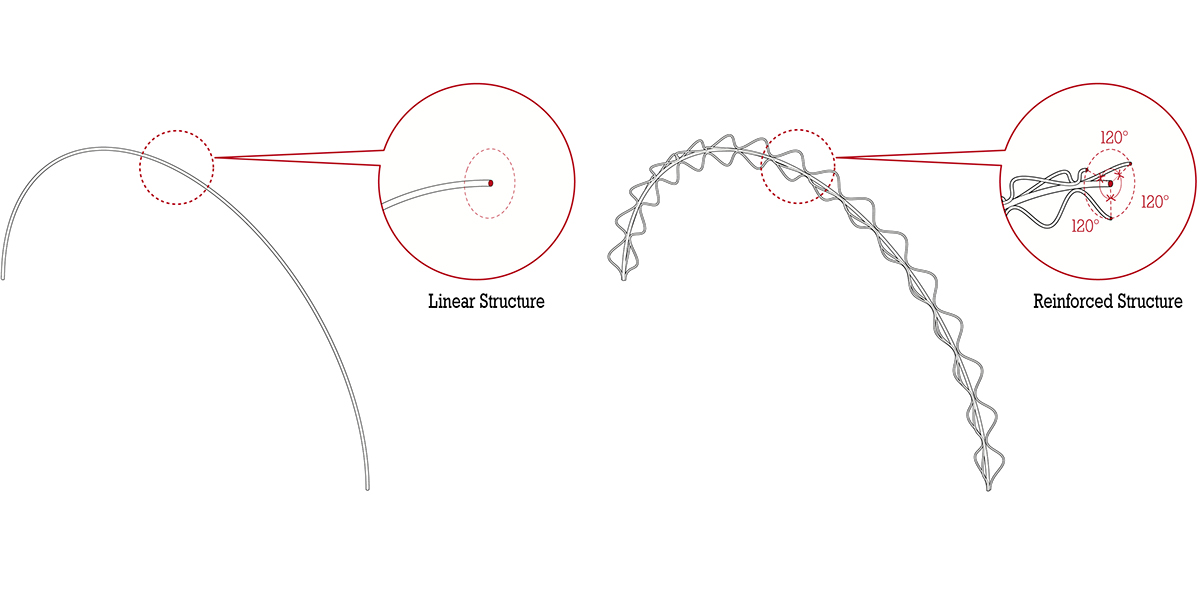
Reinforcement of Linear Structure of ABS Material
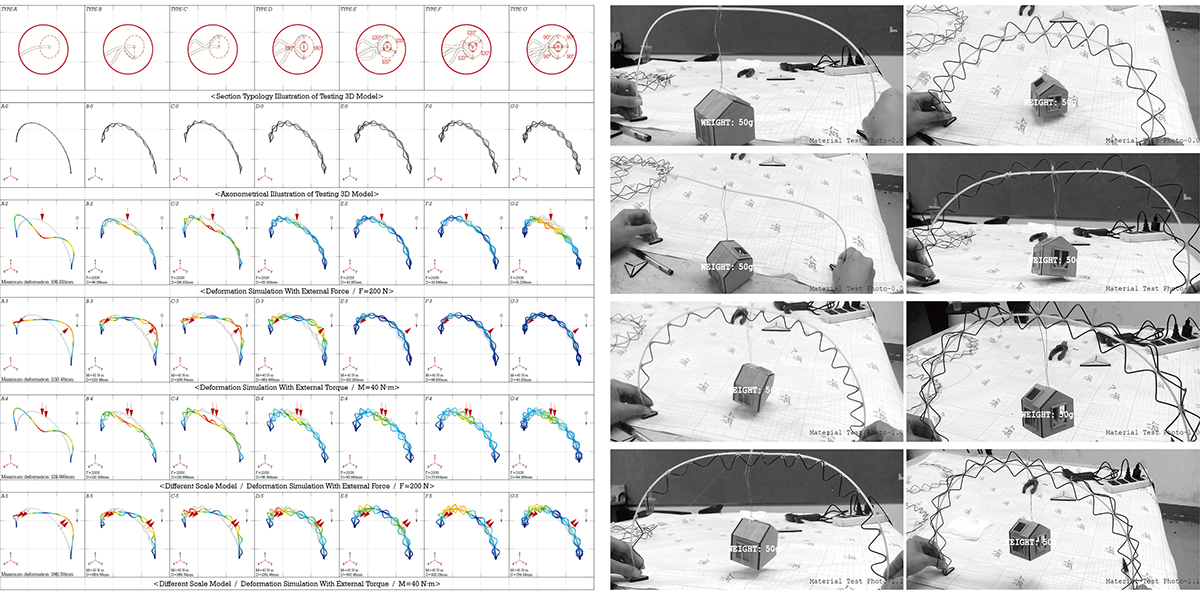
Structure Simulation Before Fabrication (Software Simulation & Physical Model Simulation)
........................................................................................................................................................................................................
PHASE 02: DESIGN OF THE PRINTING HEAD(ROBOTIC END-EFFECTOR)
In 6-Aixs 3D Printing project, the idea of biomimetic structure is realized by a delicate robotic-end effector. The core component is a petaloid turn-plate, which has 3 movable printing head attached alongside and 1 fixed printing head in the center. When the whole system is powered by a servo and start functioning, the rotation of turn-plate leads to the oscillating motion of 3 movable printing head, which in turn produce the spindle-knot-like motion trail.
The printing module is standardized 3D printing module based on thermo-plasticity of ABS material. The temperatures sensor and heater inside the module take precise control of the printing process. As a result, the 3D printing system, combined with the mechanical system, is capable of printing the biomimetic structure.
........................................................................................................................................................................................................
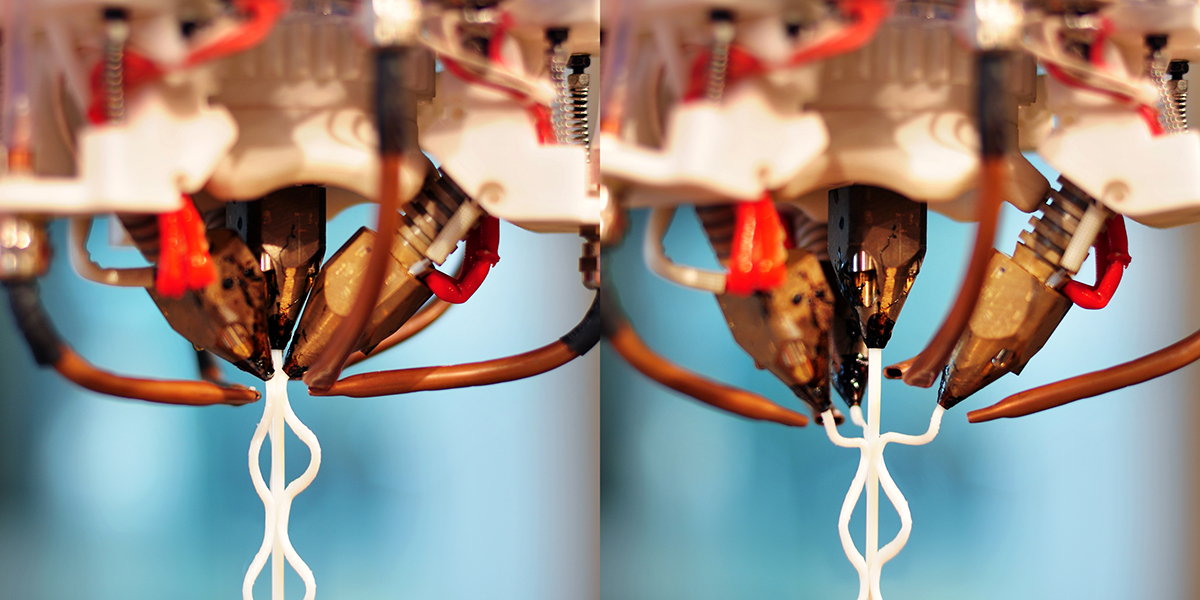
Functioning Tool Head (2 Printing Status)

Axon Illustration of the Printing Head(Robotic End-effector)
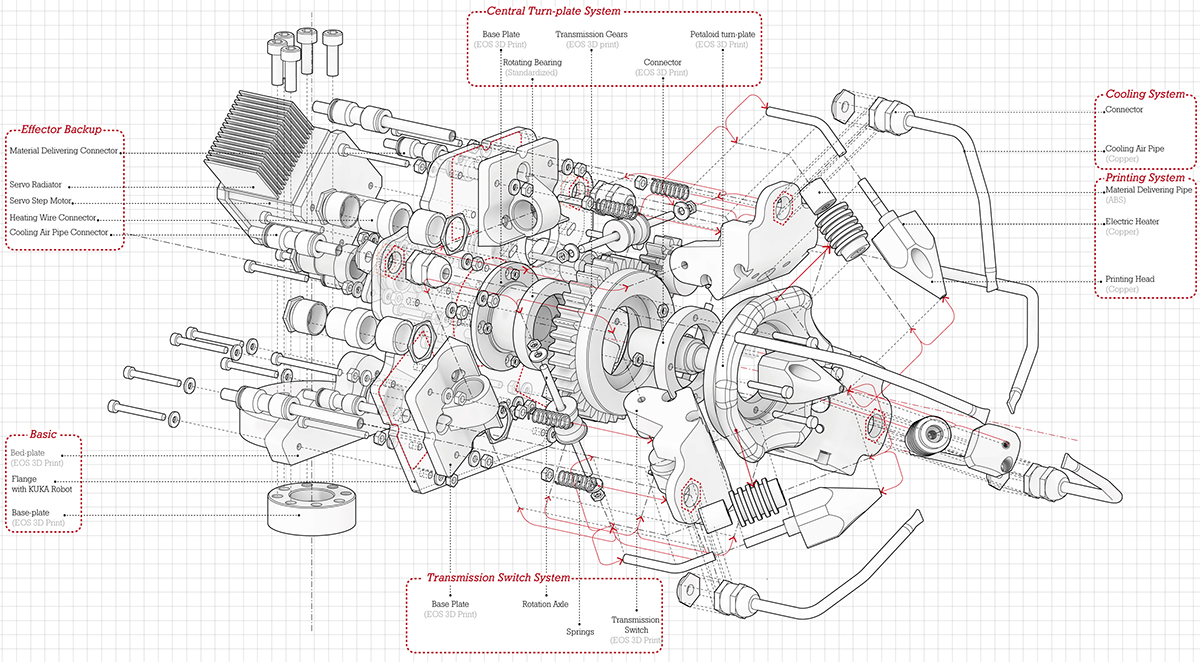
Exploded Axon Illustration of the Printing Head (Robotic End-effector)
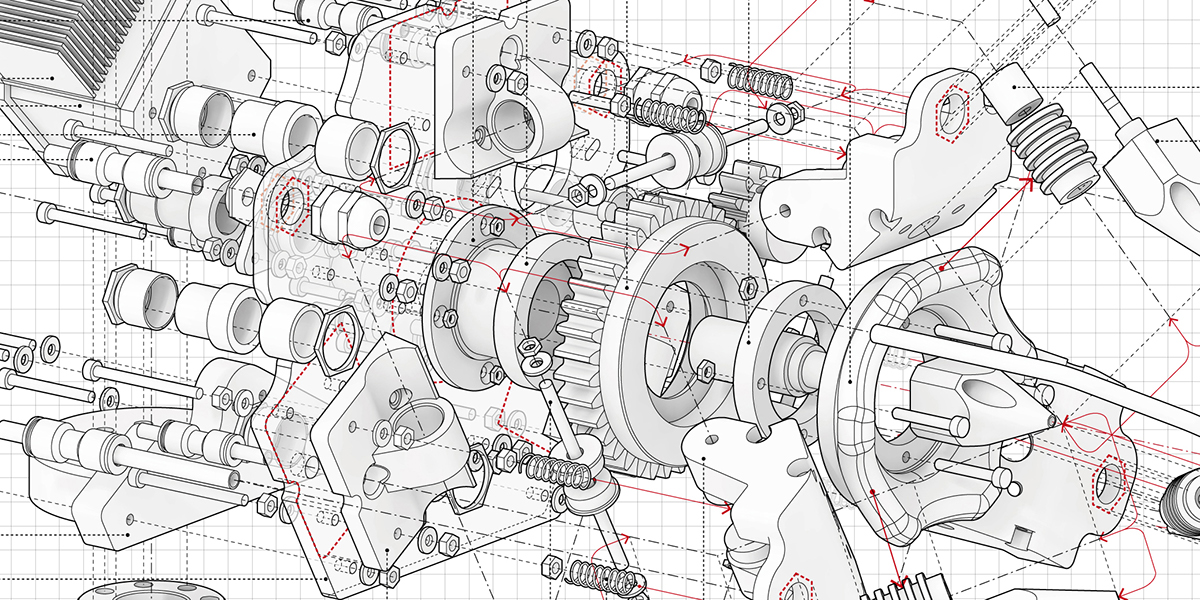
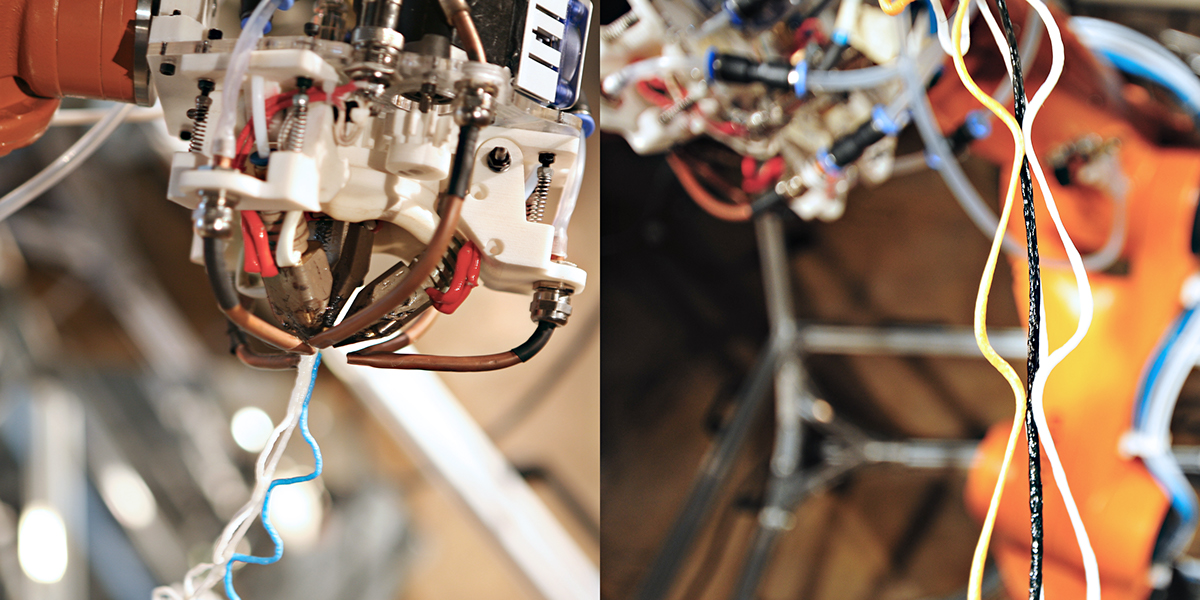
Close-up of Explode illustration - Core components of the system
........................................................................................................................................................................................................
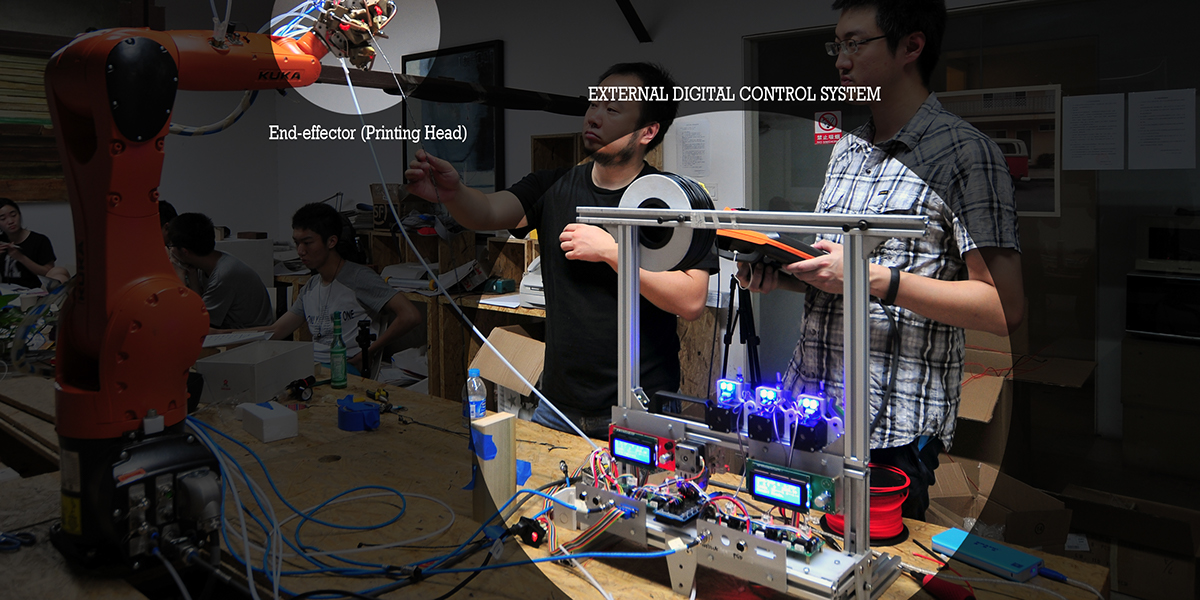
PHASE 03: DESIGN OF EXTERNAL DIGITAL CONTROL SYSTEM
The programming of the robotic-end effectors is based on Arduino. Each printing head has a heater inside which is uniquely programmed and can precisely maintain the temperature in appropriate range. Also there are tubes sending compressed air to the front of printing head to cool and finalize the material. Four material(ABS) deliver system driven by 4 individual servos works like normal 3D printing devices. Besides, one motor is responsible for the rotating motion of the central turn-plate. Both the speed of delivering and rotating can be changed via the switches on the center stack. In this case, the shape of the structure can be adjusted following the designer's idea.
........................................................................................................................................................................................................
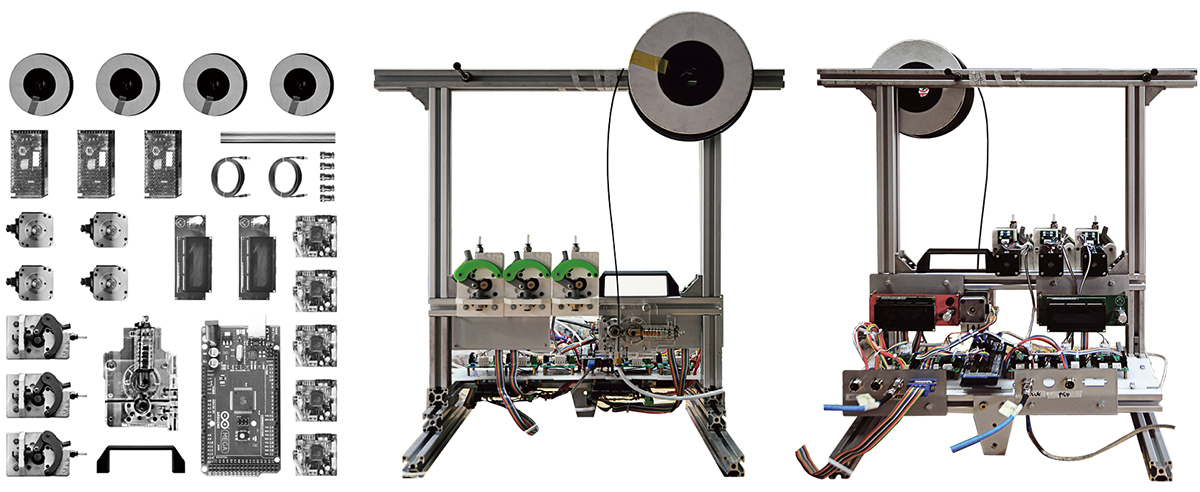
Components of External Digital Control System
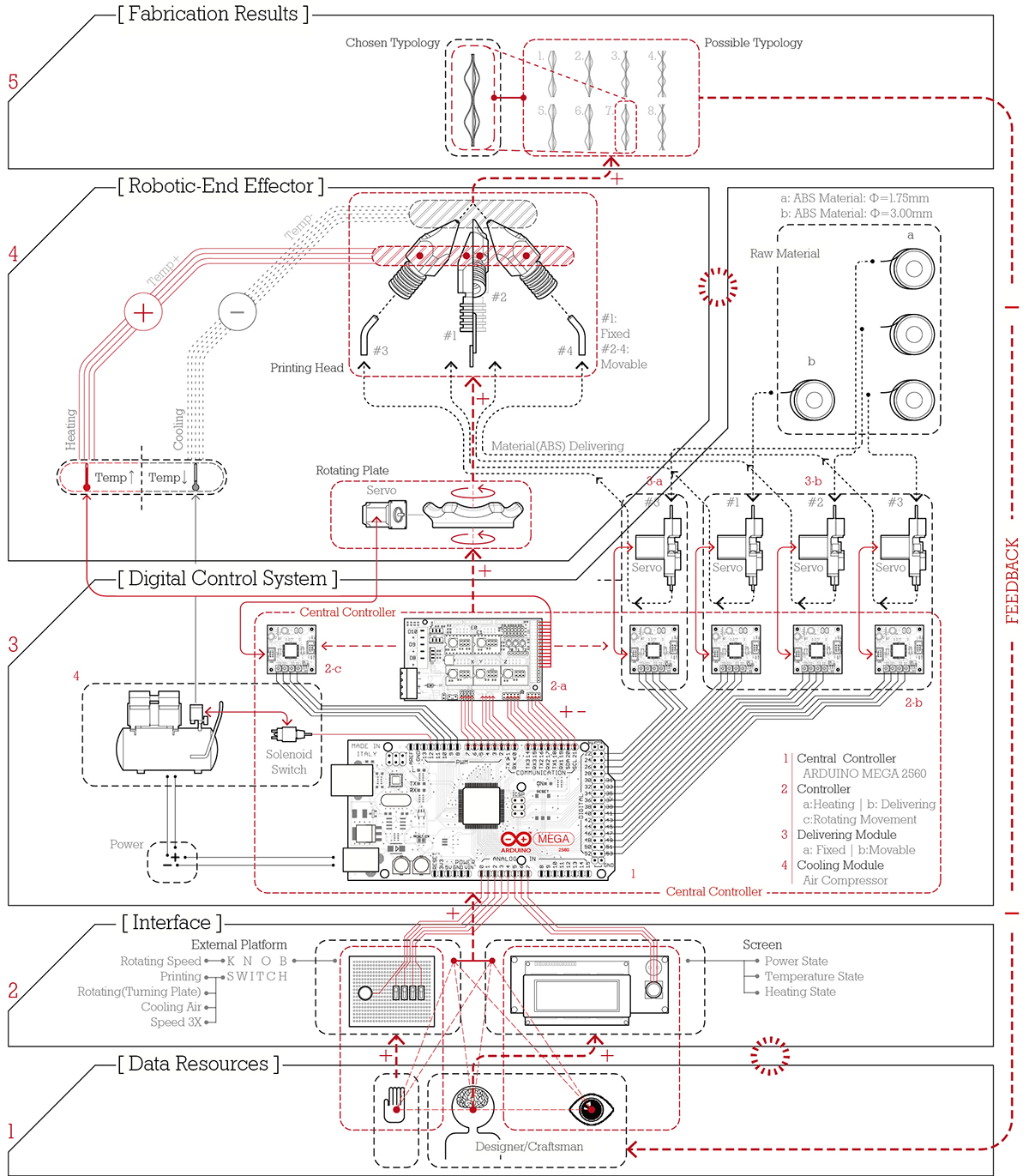
Work-flow Diagram of the Circuit System

Close-up view of the Circuit System
........................................................................................................................................................................................................
FABRICATION PHOTOS (PROGRESS/PRODUCTION/EXHIBITION)
........................................................................................................................................................................................................




Credits:
I would like to acknowledge that the whole project is work of Lei Yu (ASW, LCD, Tsinghua University). The creative printing tool was designed and tested all by Yu Lei (ASW) himself and the student team worked on making several improvements as well as KUKA robot tool path design. Any action involving publishing and commercializing issue should NOT be made until got directly permission from Lei Yu himself. This page is for academic purpose only and anyone who wants to cite from this page should be aware of citation rules.
Project Name: Robotic Extrusion(Robotic 6-Axis 3D Printing)
Copyright Owner: Lei Yu (ASW, LCD, Tsinghua University)
Brief Info: 3-week group work of "Digital Future" Shanghai Summer Workshop 2014, Shanghai
Design Team: Ji Shi, Xun Liu, Ruihua Luo, Yuqi Cui
Instructor: Lei Yu(Project Instructor, Tsinghua University, LCD, ASW)
Design Team: Ji Shi, Xun Liu, Ruihua Luo, Yuqi Cui
Instructor: Lei Yu(Project Instructor, Tsinghua University, LCD, ASW)
Photography (Filming) and Editting: Ji Shi
July-2014

