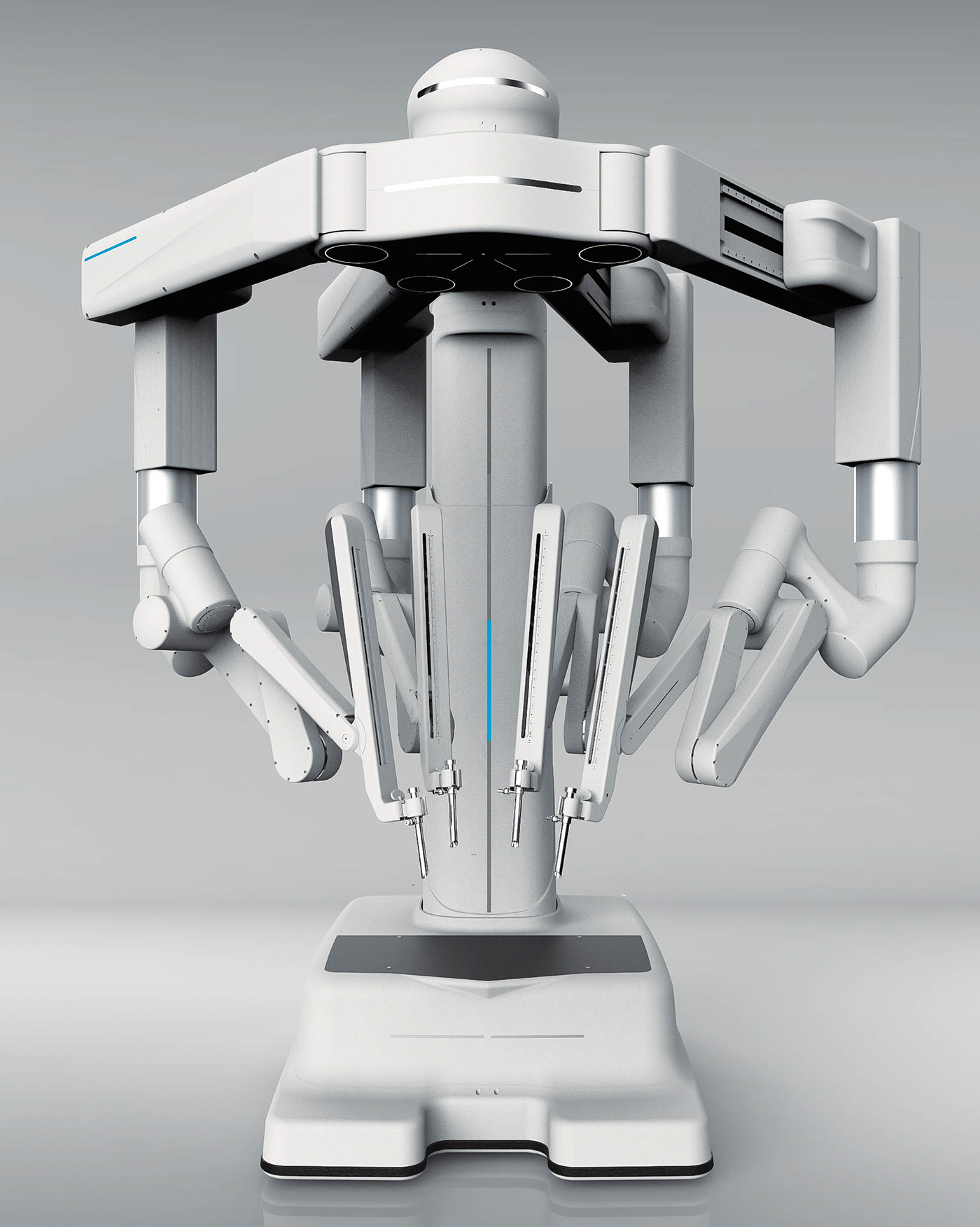
The PrecisionEdge® Laparoscopic Surgical Robot consists of three main components: the surgeon's console, the patient surgical platform, and the three-dimensional high-definition imaging system. The surgeon can comfortably sit at the console, effortlessly maneuvering the robotic arms of the patient surgical platform and connected surgical instruments. By observing the high-resolution three-dimensional images of the surgical field, minimally invasive surgery can be performed. Additionally, the PrecisionEdge® Laparoscopic Surgical Robot is equipped with a variety of robotic specialty instruments that simulate human wrist flexibility, offering flexible options for various surgical procedures. This section is mainly focused on the design process of the patient surgical platform.
精锋®多孔腔镜手术机器人由三部分组成:医生控制台、患者手术平台及三维高清影像系统。外科医生可安坐于控制台,轻松的操纵患者手术平台的机械臂及连接的手术器械,通过观看高分辨率的三维影像手术术野,进行微创手术。同时,精锋®多孔腔镜手术机器人还配备了可模拟人的手腕灵活度的、多样化的机器人专用手术器械,为各种手术术式提供灵活选择。本章节主要介绍患者手术平台的设计过程。

The Remote Catheter Manipulation System is a medical technology commonly employed in interventional cardiac procedures. This system enables physicians to manipulate a catheter remotely, facilitating precise treatments conducted outside the operating room or at remote locations.
远程导管操控系统(Remote Catheter Manipulation System)是一种医疗技术,通常用于介入性心脏手术。这一系统允许医生通过远程控制来操控导管,从而在手术室外或远程位置进行精确的治疗。
The RCM system utilizes robotic arms to control the catheter, and the design of these robotic arms involves the integration of joint structures, actuators, and sensors. These joints must provide sufficient degrees of freedom and precise motion control while maintaining adequate rigidity to ensure the accuracy of catheter manipulation during procedures.
CM系统使用机械臂来操纵导管,机械臂的设计将涉及关节结构、驱动器和传感器的集成。这些关节需要提供足够的自由度和精确的运动控制,同时保持足够的刚性,以确保导管在操控过程中的准确性。

In the multi-port surgical robot project, the focus and challenge of industrial design lie in considering human-machine interaction design without affecting the range of joint motion. In real-world scenarios, doctors or assistants often push and pull the RCM robotic arm to reach specified locations. Therefore, in the design process, color separation has been taken into account, where black components are typically designated as the interface for human-machine interaction, used for pressing or dragging.
在多孔手术机器人项目中,工业设计的重点和难点在于在不影响关节运动范围的同时考虑人机交互设计。在实际工作场景中,医生或助手通常会推拉RCM机械臂到达指定地点。因此,在设计过程中,考虑了颜色分离,其中黑色的部件通常作为人机交互的界面,用于按压或拖动。
This design takes into account two main aspects: the flexibility of the robotic arm's motion and the intuitiveness of human-machine interaction. Here are some key design principles:
这种设计考虑到了两个主要方面的需求:机械臂的运动灵活性和人机交互的直观性。以下是一些关键设计原则:

Robotic Arm Range of Motion: The design ensures that the joint structure and connecting components of the robotic arm are not restricted, maintaining sufficient degrees of freedom for precise surgical robot operations.
机械臂运动范围: 设计要确保机械臂的关节结构和连接部件不受到任何限制,以维持足够的运动自由度。这对于手术机器人的精准操作至关重要。

Human-Machine Interaction Design: The use of black components as the interface for human-machine interaction provides intuitive guidance, allowing doctors or assistants to accurately press or drag the robotic arm. Color separation reduces confusion and enhances the visual clarity of user operations.
人机交互设计: 通过使用黑色的部件来表示人机交互的界面,提供了直观的指导,让医生或助手能够准确地按压或拖动机械臂。颜色分离可以降低混淆,增加用户的操作可视性。
Pressing and Dragging Mechanism: The design of black components needs to consider the mechanism for pressing and dragging, ensuring easy and accurate execution during actual operations. This may involve the design of buttons, handles, or touch interfaces.
按压和拖拽机制: 黑色部件的设计需要考虑按压和拖拽的机制,确保在实际操作中能够轻松且准确地进行。这可能涉及到按钮、手柄或触摸界面的设计。

Ergonomics: Human-machine interaction design considers ergonomics to ensure that doctors can maintain a comfortable posture while using the robotic arm, minimizing fatigue and discomfort.
人体工程学: 人机交互的设计应考虑人体工程学,确保医生在使用机械臂时能够保持舒适的姿势,减少疲劳和不适感。
耐久性和清洁: 由于手术环境要求高度的清洁和消毒,设计的人机交互界面需要具有足够的耐久性,并且易于清洁和维护。
标志和指示: 在黑色部件上可以添加标志和指示,以提供额外的信息,例如操作按钮的功能、当前状态等,增强用户的操作体验。
Human-Machine Interaction Feedback: Providing tactile or visual feedback allows doctors to perceive whether their actions are executed correctly, improving overall operational accuracy.
人机交互的反馈: 提供触觉或视觉反馈,使医生能够感知他们的操作是否被正确执行,以提高整体的操作准确性。

Due to the larger size of the product, exceeding that of the human body, the design process has placed a significant emphasis on visual stability. By incorporating black TPU (Thermoplastic Polyurethane) material around the base, the product's visual stability has been enhanced, reinforcing the boundaries for collision detection. This facilitates doctors and nurses in planning reasonable movement paths and being vigilant to prevent collisions.
由于产品的体积较大,超过人体的尺寸,设计过程中极为重视视觉稳定性。通过在底座周围加入黑色的TPU(热塑性聚氨酯)材料,增强了产品的视觉稳定性,加固了碰撞检测的边界。这有助于医生和护士合理规划移动路径,注意防止碰撞。

Visual Stability: The addition of black TPU material around the base contributes to visual stability, providing a clear and defined boundary for the product. This aids medical professionals in maintaining a clear visual reference when operating the robotic system.
视觉稳定性:在底座周围添加黑色的TPU材料有助于提升视觉稳定性,为产品提供清晰且明确定义的边界。这有助于医疗专业人员在操作机器人系统时保持清晰的视觉参考。
Collision Detection: The enhanced visual stability strengthens the capabilities of collision detection. This is crucial for ensuring the safety of both the robotic system and the individuals in the operating environment. The black TPU material serves as a visual indicator for potential collision zones.
碰撞检测:增强的视觉稳定性加强了碰撞检测的能力。这对于确保机器人系统和手术环境中的个体的安全至关重要。黑色的TPU材料充当了潜在碰撞区域的视觉指示器。



The color scheme predominantly features white and black, opting for a non-color palette that diminishes the product's aggressiveness, enhances a sense of safety, and allows for better integration into the environment. In practical operations, the product itself is not the visual focal point; instead, the focus is on the transmission images of the patients. Therefore, the design aims to provide a sense of technology while downplaying the product's presence.
颜色选择以白色与黑色为主,这种无彩色的搭配可以减弱产品的攻击性,提高安全感,并且使得其可以更好地融入环境。在实际操作中,产品本身不是视觉的重点,患者的传输图像才是,因此尽量提供科技感的同时,弱化其存在。
Diminishing Aggressiveness: The choice of a non-color palette, featuring white and black, helps reduce the product's aggressiveness, presenting it as gentle and safe in a medical environment.
减弱攻击性: 选择白色和黑色这种无彩色搭配有助于减弱产品的攻击性,使其在医疗环境中更显得温和和安全。
Enhancing Safety Perception: Non-color designs often convey a sense of stability and safety, contributing to increased feelings of safety for both patients and healthcare professionals.
提高安全感: 无彩色设计通常会传达出一种稳重和安全的感觉,这有助于提高患者和医护人员的安全感。
提供科技感: 尽管选择无彩色的搭配,但仍旨在提供科技感,通过材料、纹理和光影等设计元素,使产品看起来现代且高科技。
Integration into the Environment: White and black are relatively neutral colors, making it easier for the product to blend harmoniously with other medical equipment and decor, creating a unified visual effect.
融入环境: 白色和黑色是相对中性的颜色,更容易与医疗环境中的其他设备和装饰相融合,创造一种统一和谐的视觉效果。
Downplaying Product Presence: In practical operations, the visual appeal of the product is minimized, allowing the focus to shift to the transmission images of the patients. This helps concentrate attention on medical procedures, increasing the focus of patients and healthcare professionals on the surgery.
弱化产品存在: 在实际操作中,将产品本身的视觉吸引力降到最低,使患者的传输图像成为焦点。这有助于专注于医疗操作,提升患者和医护人员对于手术的关注度。
Providing a Sense of Technology: Despite the choice of a non-color palette, the design still aims to convey a sense of technology through materials, textures, and lighting, presenting the product as modern and high-tech.
提供科技感: 尽管选择了无彩色的搭配,但仍旨在提供科技感,通过材料、纹理和光影等设计元素,使产品看起来现代且高科技。

In this project, I took on the role of an Industrial Design Lead, responsible for coordinating and overseeing the entire industrial design process. My responsibilities included:
在这个项目中,我担任了工业设计负责人的角色,负责协调和监督整个工业设计过程。我的职责包括:
Creative Planning and Design: I led the creative planning phase, guiding the project from concept to final design. My role involved establishing the creative direction, crafting design prototypes, and visual elements to ensure alignment with the project's innovation and aesthetic standards.
创意规划与设计:我主导了创意规划阶段,引导项目从概念到最终设计。我的工作涉及确立创意方向,制作设计原型和视觉元素,以确保与项目的创新和审美标准一致。
Team Coordination: I coordinated various team members, including mechanical engineers, assembly technicians, and electronic engineers. I ensured their work aligned with the overall creative direction and was delivered punctually. Through collaborative teamwork, we fostered cooperation across diverse professional domains.
团队协调:我协调了各个团队成员,包括机械工程师、装配技术员和电子工程师。我确保他们的工作与整体创意方向一致并准时交付。通过协作团队合作,我们促进了跨不同专业领域的合作。
Quality Control: I conducted quality control for design and content, ensuring all creative elements met brand standards and project objectives. This encompassed reviewing design prototypes, visual elements, and final products to ensure they adhered to expected quality standards.
质量控制:我进行了设计和内容的质量控制,确保所有创意元素符合品牌标准和项目目标。这包括审查设计原型、视觉元素和最终产品,以确保它们符合预期的质量标准。
Results Analysis: I supported the project manager in analyzing the effectiveness of our activities. By evaluating and providing constructive feedback on project outcomes, I contributed to refining the industrial design process, enhancing efficiency, and improving the success rate of future projects.
结果分析:我协助项目经理分析我们活动的效果。通过评估并提供对项目成果的建设性反馈,我为完善工业设计过程、提高效率以及改进未来项目的成功率做出了贡献。
In my capacity as the Industrial Design Lead, I played a role in guiding the team through the completion of an innovative industrial design project, aiming for consistency in design direction, improvements in design quality, and the accumulation of valuable experience for future projects.
作为工业设计负责人,我在引导团队完成创新工业设计项目中发挥了作用,力求在设计方向上保持一致,提升设计质量,并为未来项目积累宝贵经验。
