Mars Concept
This concept to build a colony on Mars would take 3 stages, this is stage 1, it would need no building materials from earth but uses the raw materials found on mars to create the basic structural architecture. This would be an un-manned mission, using advanced computer technology. The concept is to use a "builder robot" to use the raw materials found on mars and to build tunnels, these tunnels form the structure of the colony, where humans will live, eat, grow etc. For at the moment tunnels may be the most logical way to create living space in the harsh environment on Mars, the initial step in creating a colony on Mars.
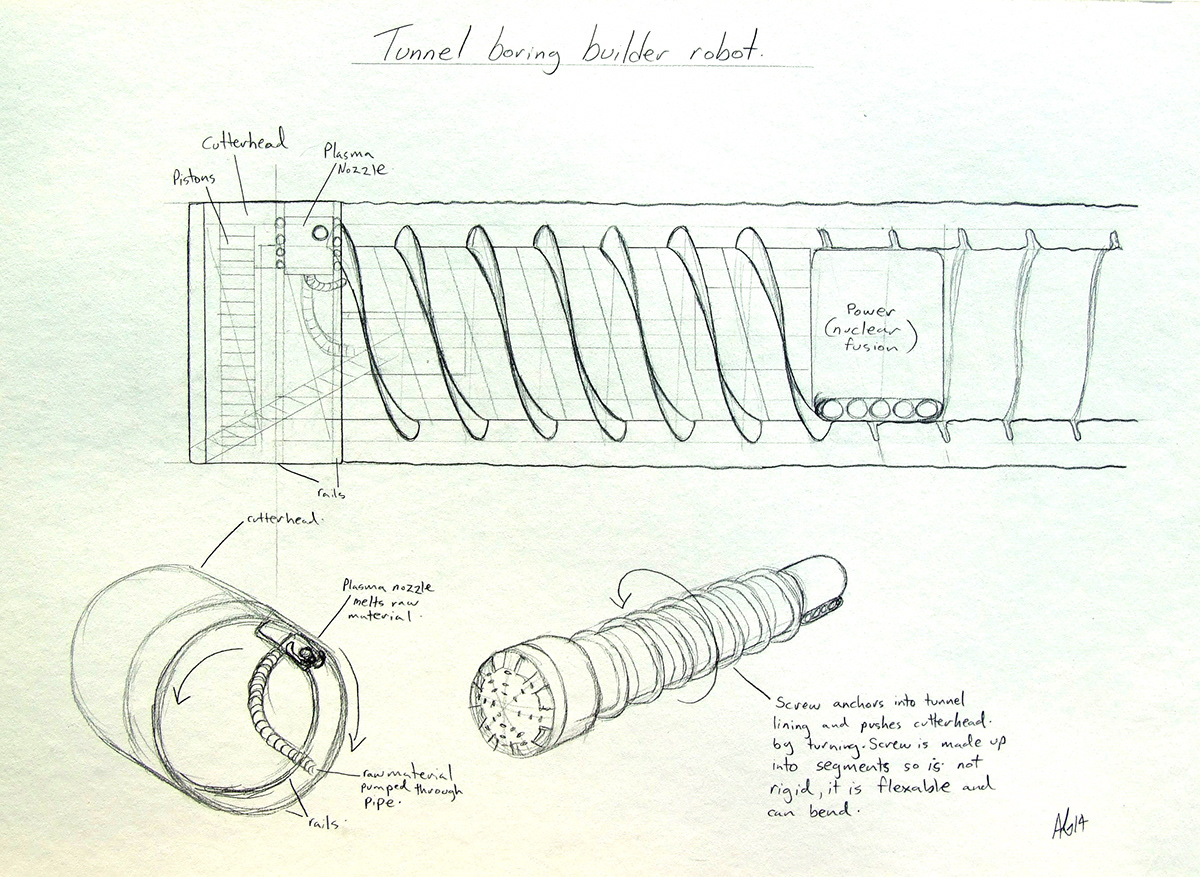
The builder robot firstly would land on Mars in conjunction with a satellite orbiting Mars, the builder robot uses G.P.S to navigate and follow its pre-programmed architectural design plan. The builder robot would bore through the rock on Mars and then turns this raw material into the walls of the tunnel behind it, using lasers to melt the rock together into the tunnel lining, forming the tunnels.
This is not science fiction, it is possible, for todays science fiction is tomorrows reality.
Tunnels
With conventional tunnels, precast tunnel linings are used, but here, the builder robot as it bores through the rock, leaves the tunnel wall lining behind it. These tunnels would not be deep into the surface of Mars, but rather skim the surface, excavating enough to build the tunnels behind it.
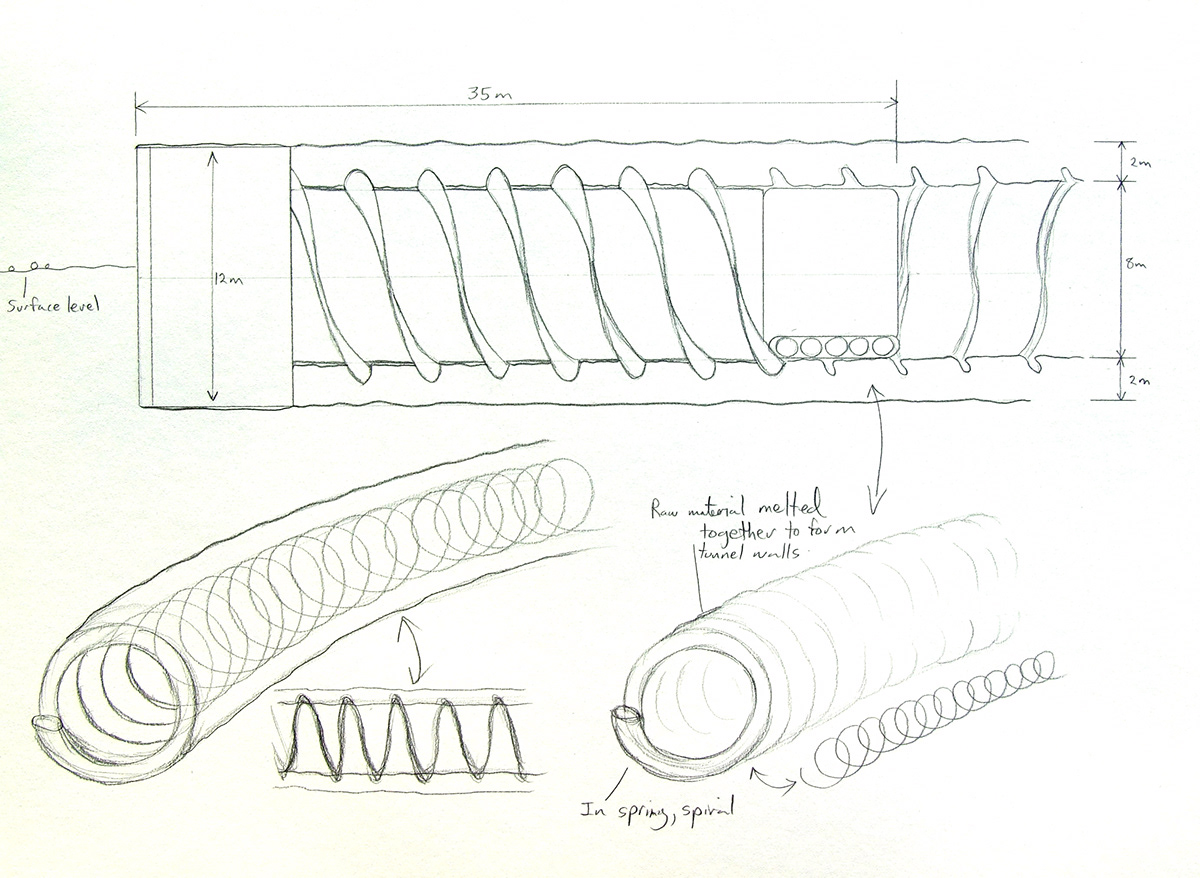
These tunnels are made by the builder robot tunneling through the marsian rock, and this material is sent via a screw to a conveyor belt, then to a crasher ro be crashed into small particles. The ice trapped beneath the surface would also be used to change the viscosity of the crashed material to a paste, so it can easily be then pumped up to a nozzle that then pumps out this paste. Which is then melted together with lasers attached to the nozzle melting the rock together, forming the tunnel lining. These tunnels are in a continuous spiral, it is formed just behind the cutter head as it moves forward a new section of tunnel is formed. This raw material is piped into a spiral around the body of the builder robot, forming a shell (just like in a nature a wasp or a caterpillar). The builder boot robot would form 10 meters of tunnels per day or 2.4km of tunnels per year. The tunnels diameter would be 10m, the tunnels lining would be formed as a continuous spiral. two meters thick, and 500mm thick. The builder robot, T.B.M, is powered by a nuclear reactor, and the large flexible screw segment propels the builder robot in the tunnel, forcing the cutter head against the rock, by turning, leaving behind a spiral groove in the tunnel lining. This groove would be used in stage two for attaching floors and equipment.
Plan
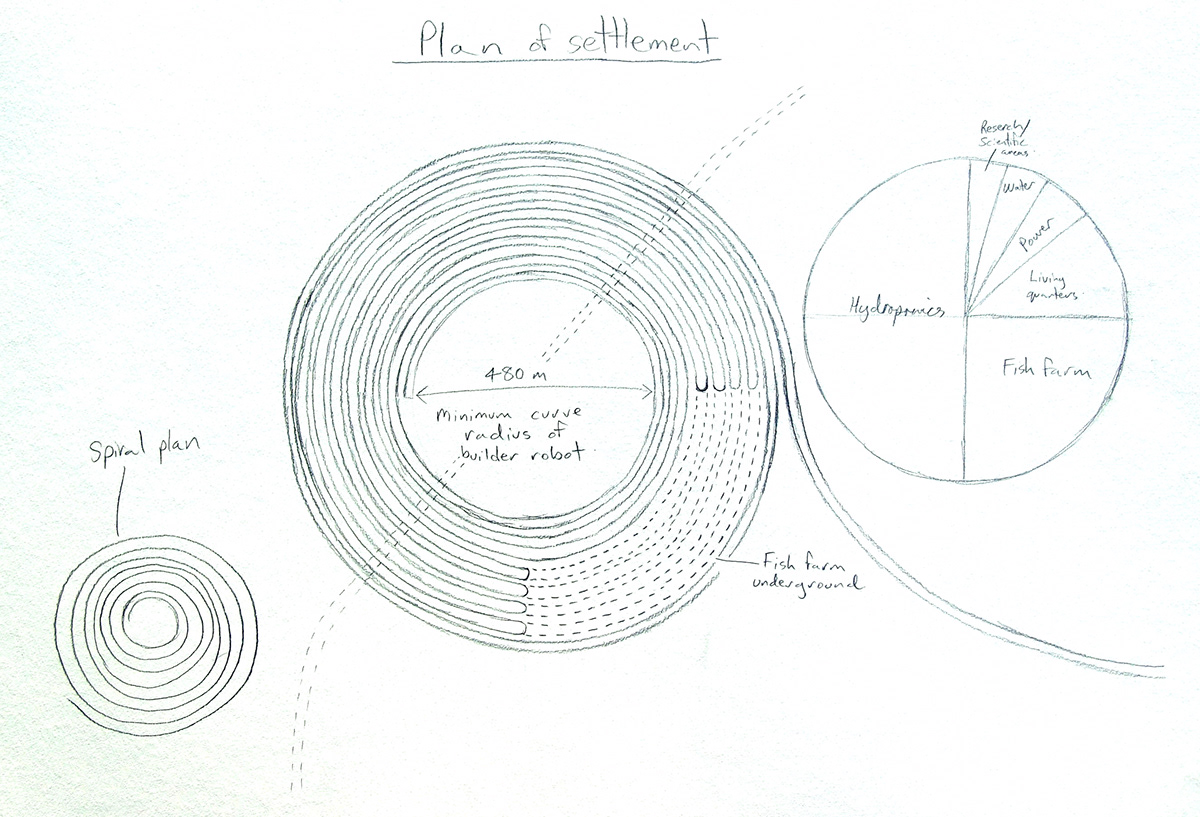
The architectural plan of these artificial underground tunnels follows nature, inspired by the formation of trees. these branches and flowers. The spiral is the most efficient continuous structure, these tunnels follow this continuous circular formation in a ever enlarging spiral as in a shell. The spiral design also allows the tunnels to be closely next to each other, so interconnecting them would be easily accomplished in stage 2.
Stage 2, would include the addition of a 3-D printer and robotics to put in and lay out water and electricity and set up equipment needed for hydroponics and aquaponics. The 3-D printer would collect the excess raw materials that the builder robot leaves behind, and would turn this into equipment needed. Each spiral on the plan would be a colony of humans, the builder robot would continue until its nuclear power runs out, it's design would include 20 colony's, all inter-connected via main tunnels, like a branch of a tree. The branches and trunk of the plan acts as main arterial roads to other spiral colony's.