

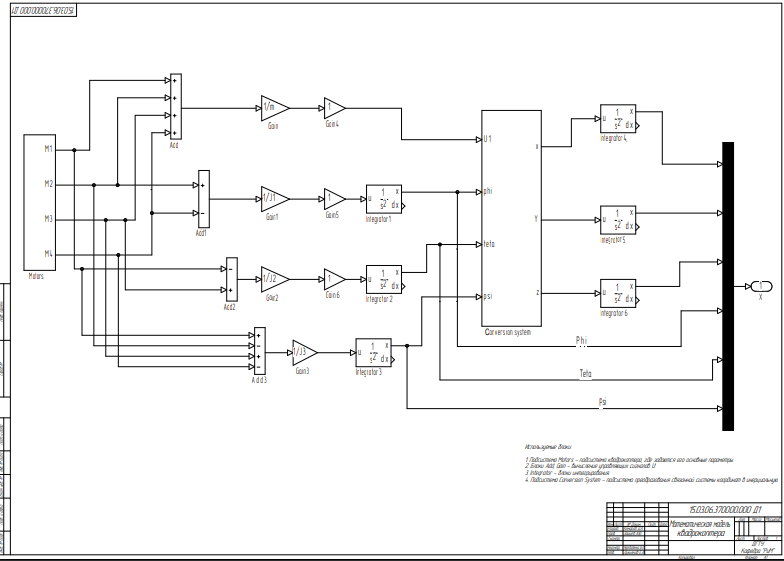

Проектирование автономного квадрокоптера. Разработана математическая модель квадрокоптера, на её основе, реализована адаптивная система управления в скользящем режиме. Полученные результаты дают возможность управлять объектом в условиях ограниченной неопределенности. С помощью алгоритма SURF, реализуется распознавание на полученных изображениях, заданных объектов.


