Concept & Prototype: Robotic Gripper

Context: On a group of 4 members, we were assigned an academic project to create a Robotic Gripper of per-determined dimensions which was capable of exerting a load of 100N (approx. 22.481 lbf/ 10.197 kgf). After intensive research on various designs and performing multiple iterative FEA analyses, we came up with an innovative design that had optimized load distribution with minimum material usage. We analyzed the cost of production and manufacturing process, functions and labour costs etc.
Keywords:
3 D Printing, Cost Analysis, FEA Analysis, Manufacturing, Mechanical Assembly, Mechanical Design, Mechanical Drawings, Mechanical Product Design, PowerPoint, Rapid Prototyping, SolidWorks, Teamwork, Objet30,U-Print
Course Module: MSE 995 Advanced Modelling and Prototyping
Members: Rikdev Basu, Nitish Goel, Prithvi Raj & Yutong Guo
Guide: Prof.Shahram Amiri
Location: Simon Fraser University, British Columbia
Year: 2017
Drafting & Designing
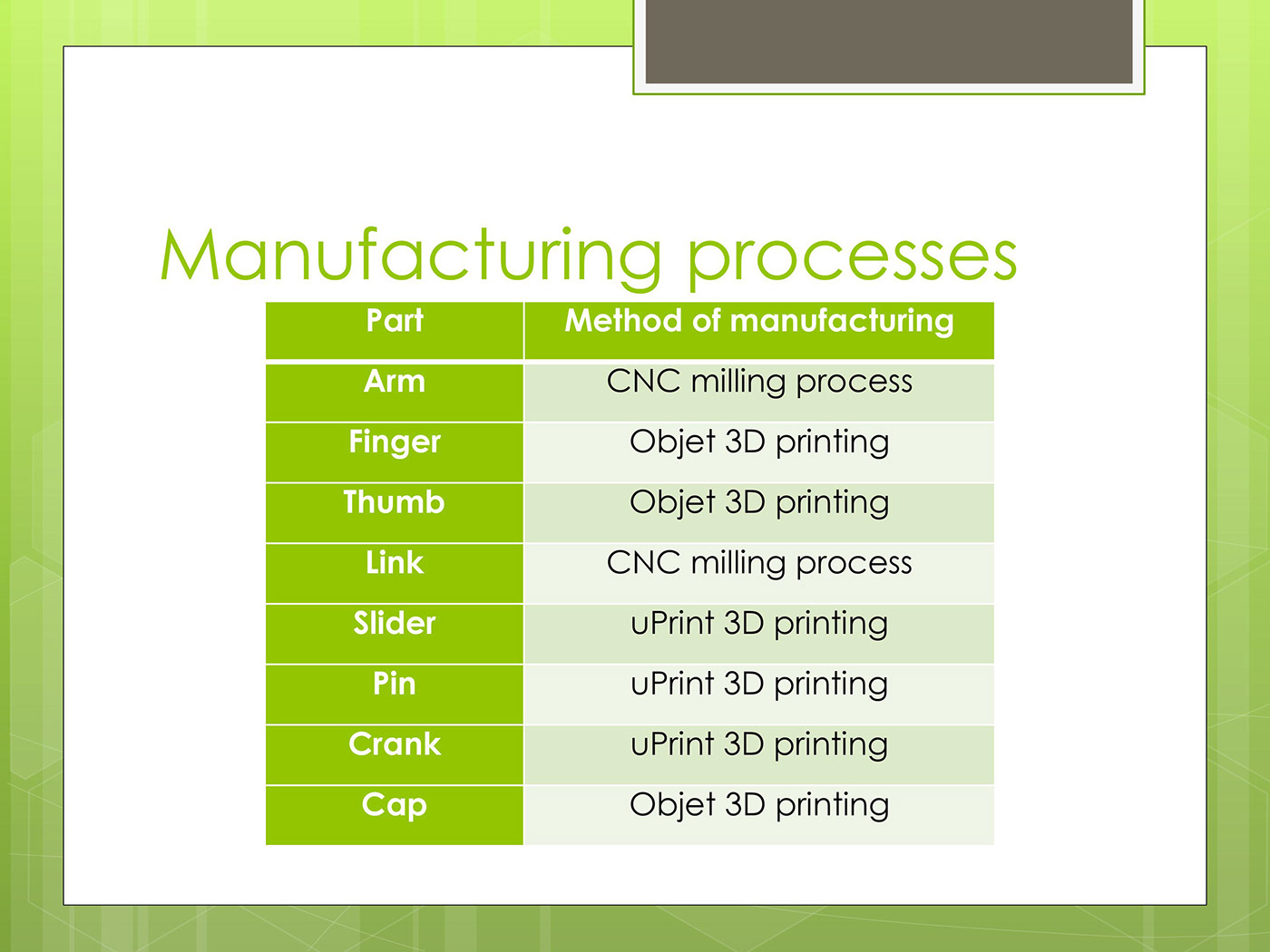
We sculpted our ideas into a 3D models using SolidWorks. Used traditional manufacturing techniques of drilling and milling on CNC for the metallic parts and additive manufacturing technique of 3D printing on Objet30 and U-Print printers to make the non metallic parts to make it as cost-effective as possible.
Challenges faced - It was difficult to prototype a curved 3D structure that could be easily 3D printed while minimizing usage of support materials. We constantly had to check on the production limitations, and also the uniformity of stress distribution on the hand design to prevent structural failures. Additionally, our objective included to minimize material usage without compromising the functionality.


Methodology
1. Hand - The basic dimensions of the Hand was predetermined. We created multiple model iterations to achieve better stress distribution, optimized usage of materials and to ensure it could be prototyped using the available 3D printers.



2. Novel Slider - We created and conducted iterative stress analysis of the slider to ensure structural stability and stress distribution. We documented the improvements in each of the steps and identified the loopholes in our former designs.




3. Connectors - Designed and prototypes connector pins for joining the various 3D printed parts and connector caps to prevent slippage of the pins.


4. Stress Analysis Process - We tested the stress distribution and deformation of the FEA model of the prototype prototype by modifying and testing various structural parameters. With each iterations , we aimed to minimize deformation , optimize stress distribution and minimize material required without compromising functionality.




Cost of Print & Production
1. Objet
Model: $0.3 per gram
Support: $0.2 per gram
Machine use: $1 per hour
Setup fee: $30
We printed the thumb, the fingers and six caps by Objet 3D printer, which consume 75 g model material and 81 g support material.
Total cost: $48.78
2. uPrint
Model: $5 per cubic inch
Support: $8 per cubic inch
Machine use: $1 per hour
Setup fee: $25
We printed the crank, the pin and the slider by uPrint 3D printer, which consumed 3.92𝒊𝒏𝟑 model material and 0.51𝒊𝒏𝟑 support material.
Total cost: $54.11
3. Labour Cost
From indeed we can obtain the salary of SolidWorks designer for a coop student in BC is about $18 per hour. We used about 10 hours. So, the labor cost is about $180.
Scope of Improvement
To reduce the cost, we can do the following improvement.
1. Remove material from the middle part of finger.
2. All parts can be printed by uPrint.
Thank You
