About the Google Lunar X Prize and Puli Space Technologies
The goal of the competition called Google Lunar X Prize (GLXP) is to give inspiration for developing new technologies on the field of space research. The grand prize will be won by the team - financed by private equity - which can first accomplish the given criteria that is to send a spacecraft to the Moon until 2014. 26 out of 33 participants are still in the competition in the project also known as Moon 2.0. One of them is the Hungarian Puli Space Technologies.
Puli Space Technologies came to the Moholy-Nagy University of Art and Design to organize a 5-day-workshop to design a Lunar Rover. The aim of the workshop was to help the Puli Space Team's work at the competition with finding new solutions and ideas for the spacecraft that will be sent to the Moon.
The goal of the competition called Google Lunar X Prize (GLXP) is to give inspiration for developing new technologies on the field of space research. The grand prize will be won by the team - financed by private equity - which can first accomplish the given criteria that is to send a spacecraft to the Moon until 2014. 26 out of 33 participants are still in the competition in the project also known as Moon 2.0. One of them is the Hungarian Puli Space Technologies.
Puli Space Technologies came to the Moholy-Nagy University of Art and Design to organize a 5-day-workshop to design a Lunar Rover. The aim of the workshop was to help the Puli Space Team's work at the competition with finding new solutions and ideas for the spacecraft that will be sent to the Moon.
The concept I 3-wheel-set-up
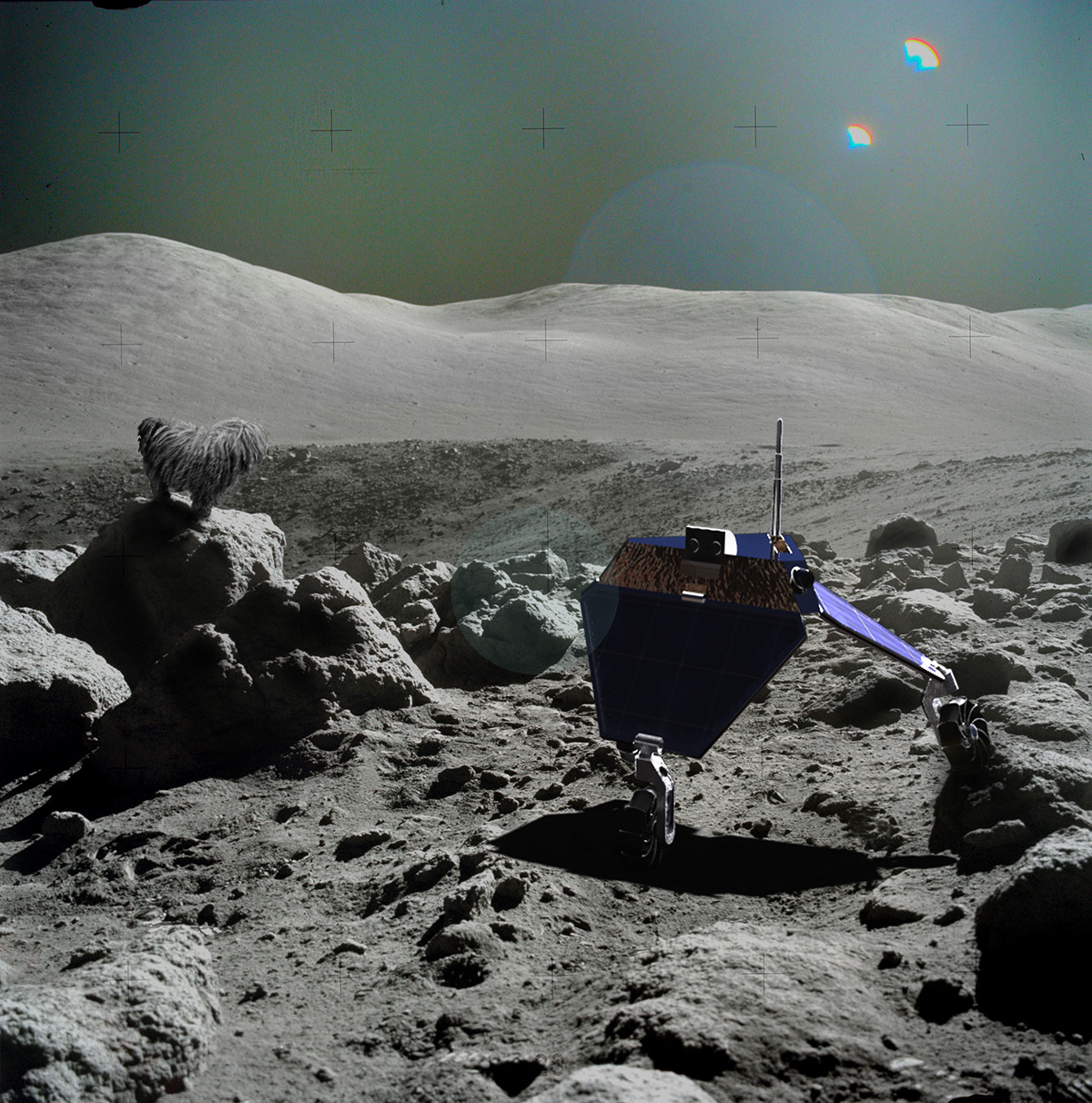
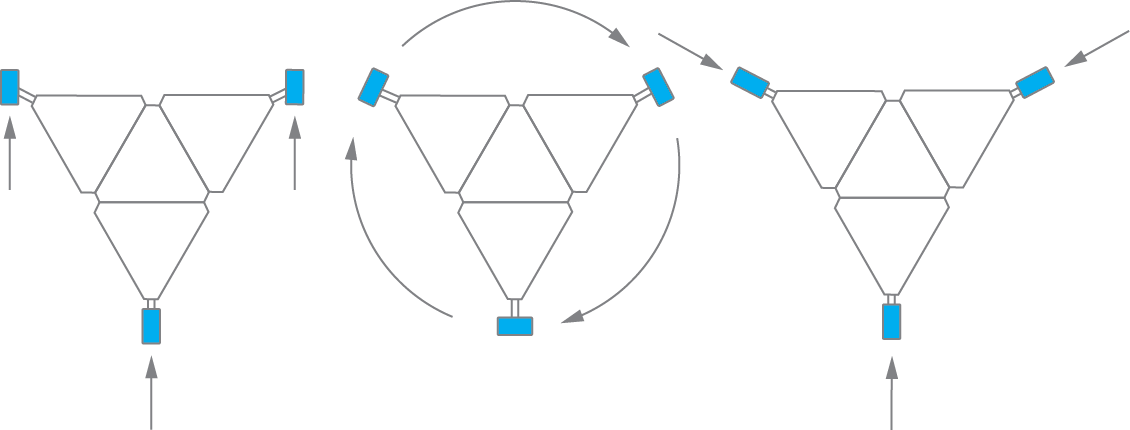
A 3-wheel-construction was created during the designing. With this construction we wanted to place the wheels as far as possible from the box containing the cameras and the instruments. Hence we have a relatively big spread and the Lunar Rover will be more stable underway. At the same time we tried to lift the whole structure as high as possible from surface to prevent the solar panels and the instruments from the ascending dust. The other advantage of the construction is the adjustable height of the rover which is possible with pulling together or releasing its legs. Therefore when small stones and swells come across underway, it can change to standing position, so the obstacles can fit between the legs and there is no need to bypass them. Moreover, this helps in case of panorama pictures, giving extra height to the camera in standing position. The adjustment of the control and the spread work with the sedentary rotation of the wheels, depicted in the picture.
A 3-wheel-construction was created during the designing. With this construction we wanted to place the wheels as far as possible from the box containing the cameras and the instruments. Hence we have a relatively big spread and the Lunar Rover will be more stable underway. At the same time we tried to lift the whole structure as high as possible from surface to prevent the solar panels and the instruments from the ascending dust. The other advantage of the construction is the adjustable height of the rover which is possible with pulling together or releasing its legs. Therefore when small stones and swells come across underway, it can change to standing position, so the obstacles can fit between the legs and there is no need to bypass them. Moreover, this helps in case of panorama pictures, giving extra height to the camera in standing position. The adjustment of the control and the spread work with the sedentary rotation of the wheels, depicted in the picture.
Tetrahedron shape
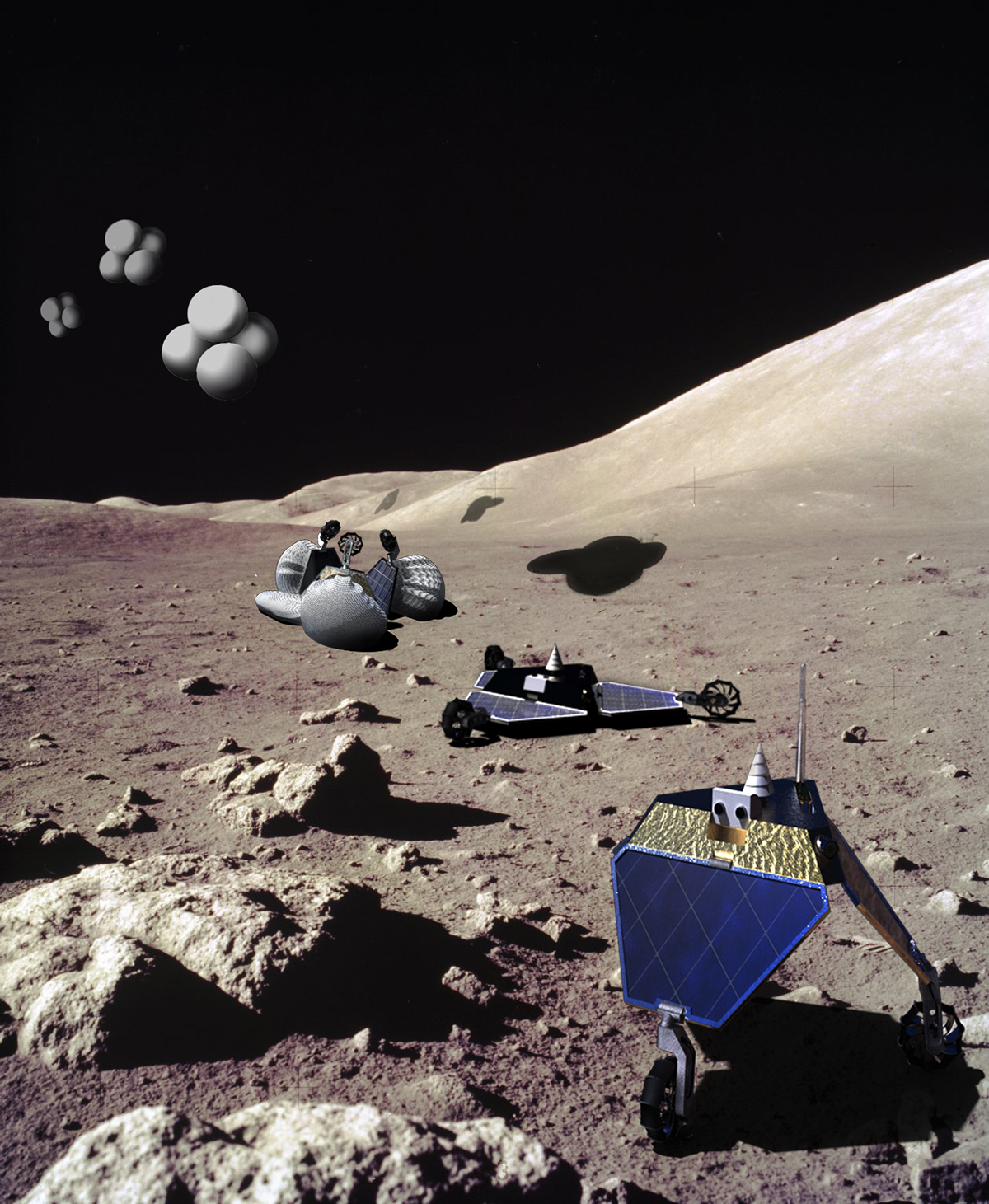
The 3 wheel structure is embedded into a tetrahedron shape, allowing the rover tobe compactly folded, while the sides holding its legs give plenty of space forsolar panels and advertising slots. The tetrahedron shape is able – similarly to the also tetrahedron shaped lander, transporting the Mars Rover – to tilt toits bottom from any position by splitting, and then install itself. In additionthis creates the opportunity to the landing unit and the rover to be onestructure, therefore allowing the rover to have a greater size, to contain moreinstruments and to execute more duties. In this case, the rover lands with theairbag method.
The 3 wheel structure is embedded into a tetrahedron shape, allowing the rover tobe compactly folded, while the sides holding its legs give plenty of space forsolar panels and advertising slots. The tetrahedron shape is able – similarly to the also tetrahedron shaped lander, transporting the Mars Rover – to tilt toits bottom from any position by splitting, and then install itself. In additionthis creates the opportunity to the landing unit and the rover to be onestructure, therefore allowing the rover to have a greater size, to contain moreinstruments and to execute more duties. In this case, the rover lands with theairbag method.

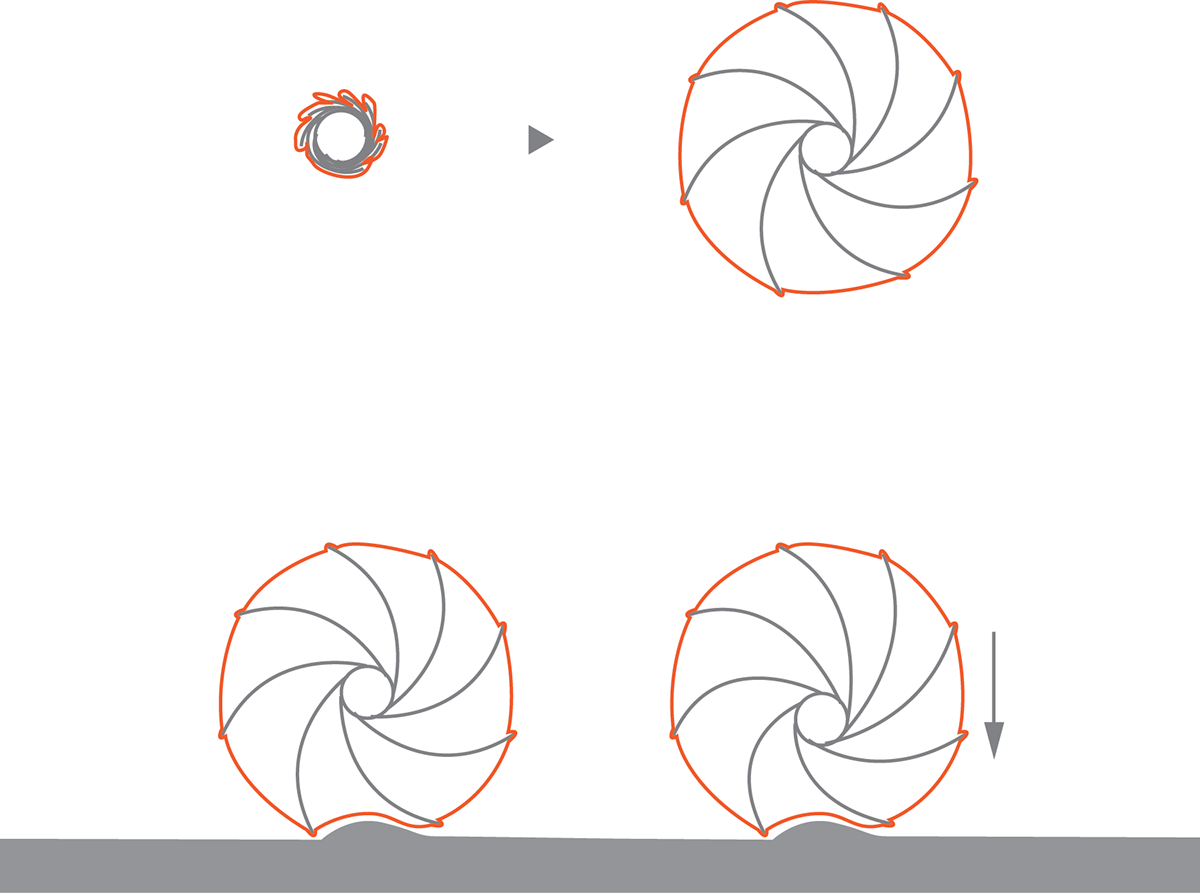
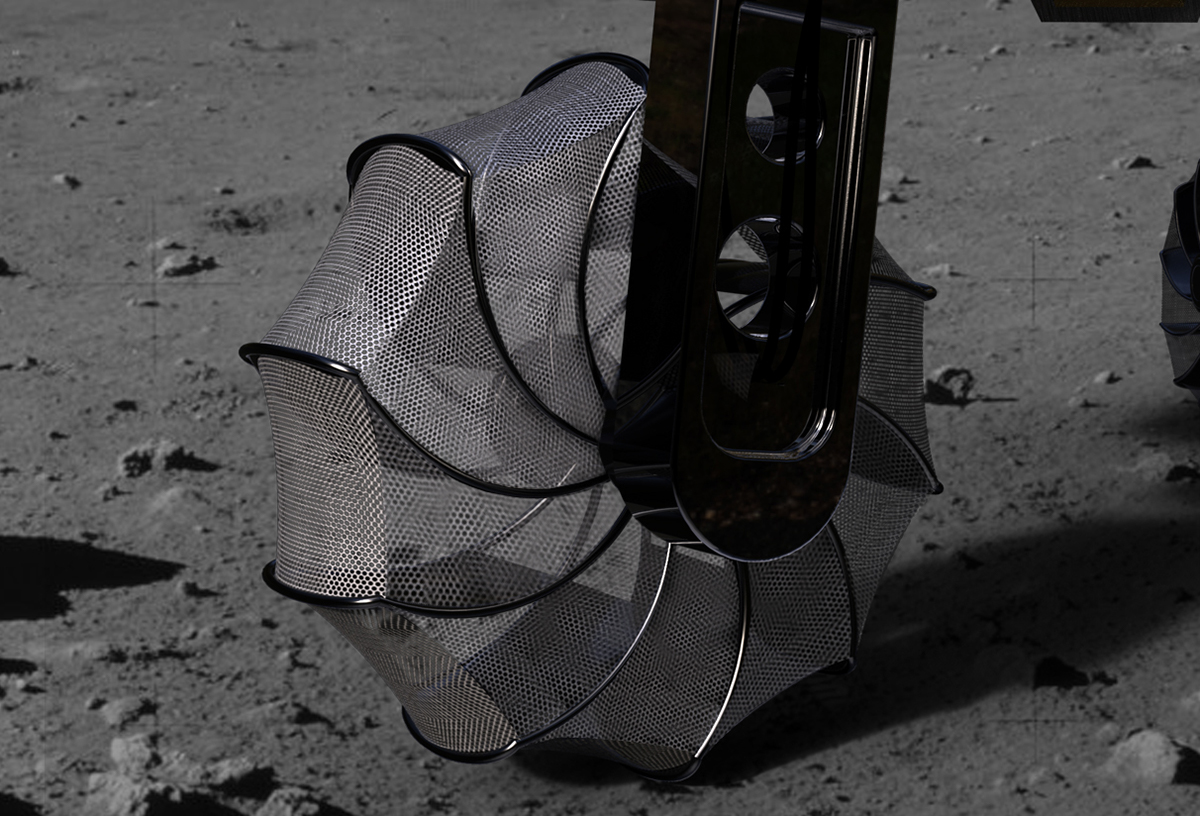
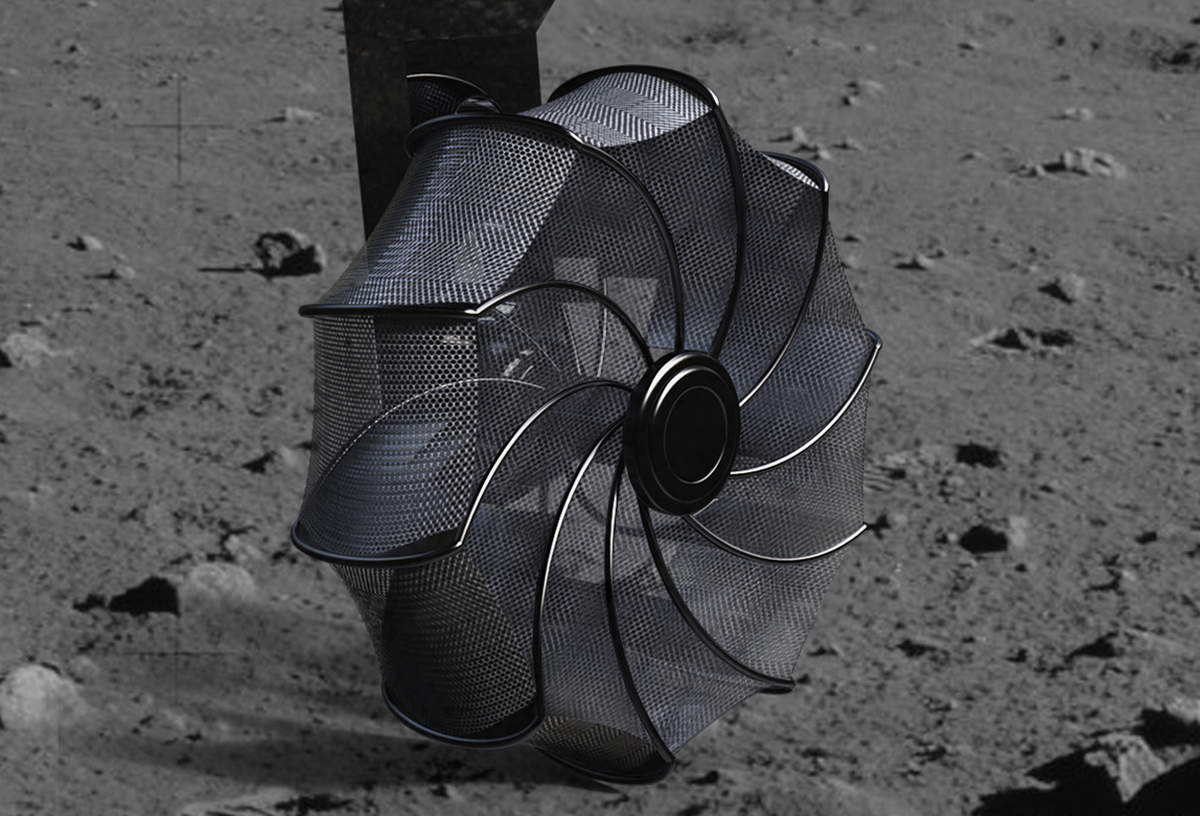
Wheels
The spiral structure ofthe wheels is responsible for shock absorption and for being able to be wrappedup to very small size. The spiral frame is covered by a canvas layer to avoiddust getting into the wheel spokes and to reduce the possibility of diggingitself into Moon dust while turning. The loose stretch of the canvas on thewheels allows them to slick to smaller obstacles, resulting in a stronger gripon them. Therefore the rover is able to climb 30-degree inclines moreeffectively.
The spiral structure ofthe wheels is responsible for shock absorption and for being able to be wrappedup to very small size. The spiral frame is covered by a canvas layer to avoiddust getting into the wheel spokes and to reduce the possibility of diggingitself into Moon dust while turning. The loose stretch of the canvas on thewheels allows them to slick to smaller obstacles, resulting in a stronger gripon them. Therefore the rover is able to climb 30-degree inclines moreeffectively.
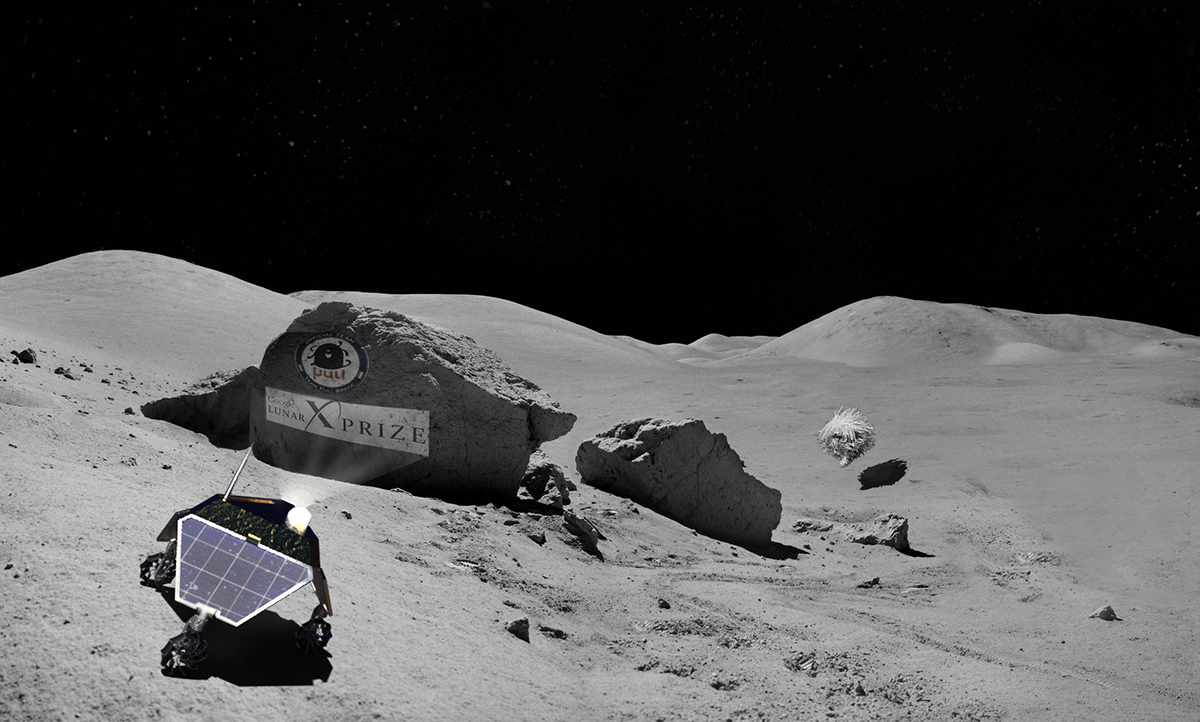
Sponsors on the Moon
According to the tender of GLXP, the main sponsors must be displayed on the Lunar Rover, and pictureshave to be taken with the sponsors and the surface of the Moon visible in them.An appropriate surface could be the triangle shaped leg component. In addition,an alternative solution has been worked out for displaying the sponsors. According to our concept, a projector will be installed on the rover next tothe cameras. Therefore the logos of the sponsors will be projected on the Moonsurface, even in such sizes, that a unit orbiting around the Moon could take apicture of them. In displaying there can be new possibilities, such asanimation or the display of the complete cast.
According to the tender of GLXP, the main sponsors must be displayed on the Lunar Rover, and pictureshave to be taken with the sponsors and the surface of the Moon visible in them.An appropriate surface could be the triangle shaped leg component. In addition,an alternative solution has been worked out for displaying the sponsors. According to our concept, a projector will be installed on the rover next tothe cameras. Therefore the logos of the sponsors will be projected on the Moonsurface, even in such sizes, that a unit orbiting around the Moon could take apicture of them. In displaying there can be new possibilities, such asanimation or the display of the complete cast.
Learn more about how we work, subscribe to our newsletter!
Click here to follow us on Twitter and receive instant
updates on our design activity!
updates on our design activity!

