Often times I find myself in desperate need of a back or neck massage -- as I’m sure many of you do too – but lack the superhuman capabilities to actually give myself one effectively. As a dancer with some minor back issues due to various sports I participated in as a kid, it is not just a matter of leisure but rather a necessity for my body’s well being. Sure, I could ask someone else to help me out, but there are only so many times you can ask someone. Plus most of the time you end up having to take turns at it, which in my opinion embodies the idea of suffering (hands aching) in an effort to later attain happiness.
While trading massages with a friend can be a good option, thefact of the matter is that it is not always a readily available option – unlessyou actually have the funds to have a regular masseuse, which I cannot quiterelate to – and is likely to not be exactly what you are looking for. Wouldn’tit be great if you could come from a long day, hit a few buttons, and enjoy amassage exactly the way you like it? Attending to exactly the spots that ache?It is this very idea that inspired me to design the MassageME, a robotic massagersystem composed of three main components:
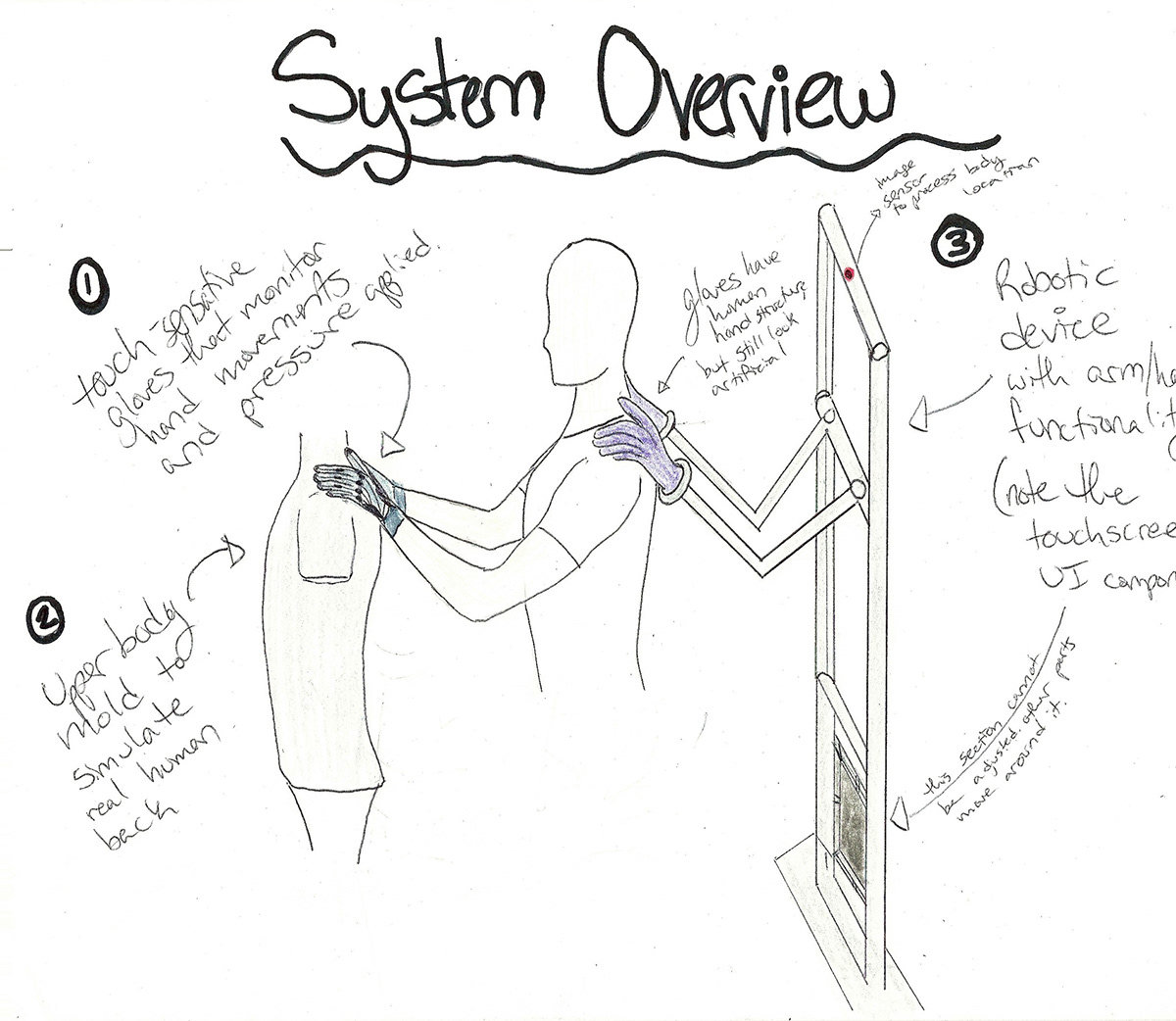
(1) Arobotic device with human-like arms and hands, as well as a touchscreen UI.
(2) A pairof skin-tight gloves that precisely and accurately detect the user’s handmotions.
(3) Astand-alone mold of a human’s upper-body, made with life-like substances toproperly simulate the feel of a human’s back, that act as a tangible interfacefor the user when using the gloves.
While trading massages with a friend can be a good option, thefact of the matter is that it is not always a readily available option – unlessyou actually have the funds to have a regular masseuse, which I cannot quiterelate to – and is likely to not be exactly what you are looking for. Wouldn’tit be great if you could come from a long day, hit a few buttons, and enjoy amassage exactly the way you like it? Attending to exactly the spots that ache?It is this very idea that inspired me to design the MassageME, a robotic massagersystem composed of three main components:
(1) Arobotic device with human-like arms and hands, as well as a touchscreen UI.
(2) A pairof skin-tight gloves that precisely and accurately detect the user’s handmotions.
(3) Astand-alone mold of a human’s upper-body, made with life-like substances toproperly simulate the feel of a human’s back, that act as a tangible interfacefor the user when using the gloves.

The Weemee, a robot massager currently on the market.
The biggest obstacle for this product would be to effectively get past the Uncanny Valley, which has still not been entirely achieved as far as I am aware. Optimally, the hands, which are arguably the most critical parts of the system, would move exactly as a human’s do. This is the part that I foresee being the most difficult to achieve, given that modern day robots still move in an inherently robotic fashion. People are easily wary ofanything involving artificial life. This is why many androids are created anddesigned such that they have some feature that is clearly not organic (e.g.putting a very life-like Albert Einstein head on a very robotic looking body).For this very reason I made sure to incorporate a proper balance of life-likeand robotic aesthetic components such that it would mostly look like a machine.
Although I had a multitude of rougher sketches, I have onlyincluded the final design drawings and storyboard in this presentation.
First, let us take a look at the overall system. As you can seethe basic process is that the robot hands mimic the hand motions that the useris doing to the mold, and applies these mimicked motions to the user’s back. The robotic stand portion is meant to be adjustable in height to accommodateuser preferences to sitting or standing (this can be seen by looking at some ofthe line detail in the sketch). Ultimately, I would want the robot to becollapsible around the touchscreen and easy store, but this was not tackled inthis first iteration.
First, let us take a look at the overall system. As you can seethe basic process is that the robot hands mimic the hand motions that the useris doing to the mold, and applies these mimicked motions to the user’s back. The robotic stand portion is meant to be adjustable in height to accommodateuser preferences to sitting or standing (this can be seen by looking at some ofthe line detail in the sketch). Ultimately, I would want the robot to becollapsible around the touchscreen and easy store, but this was not tackled inthis first iteration.
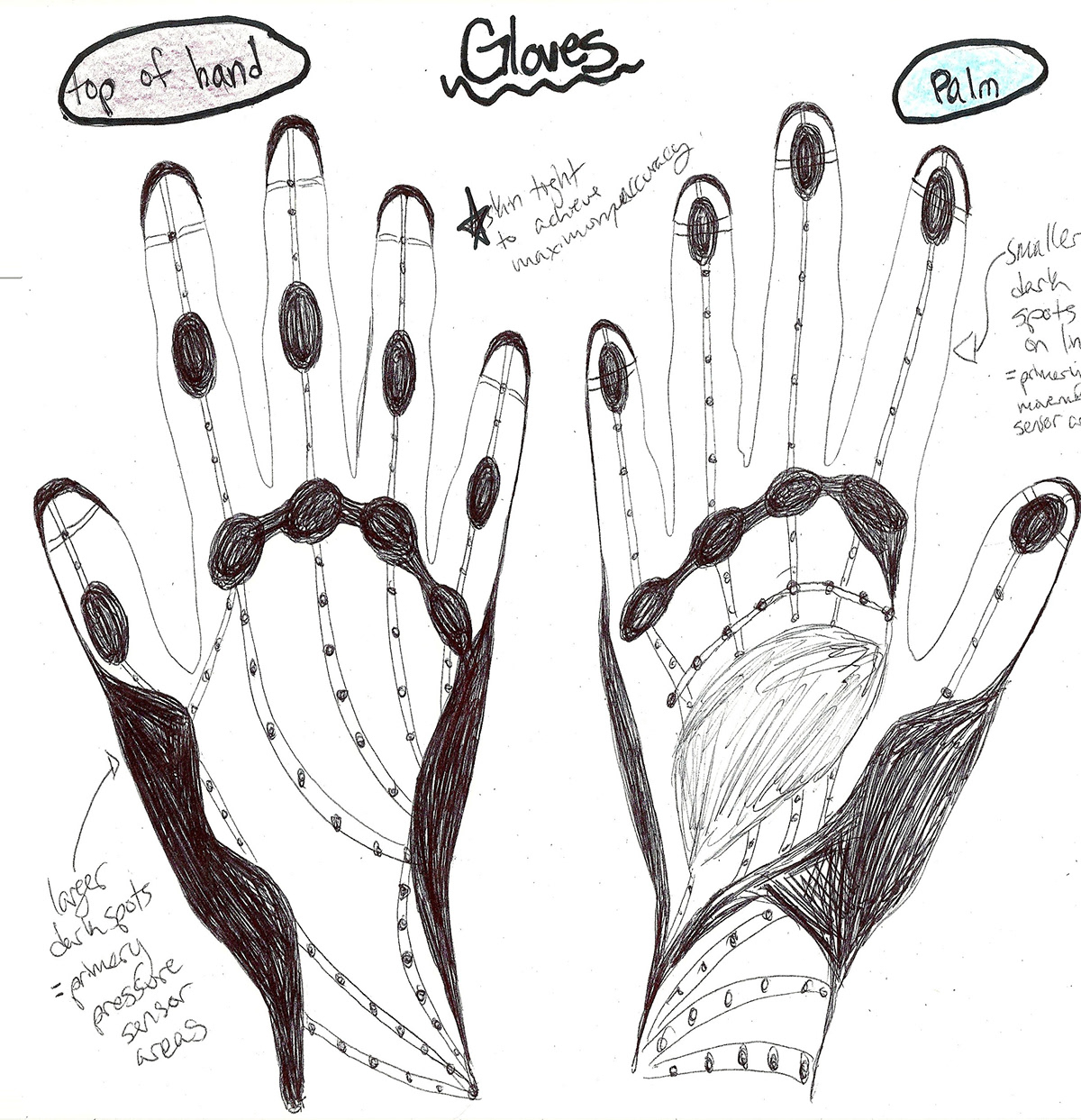
Here is a more detailed view of the gloves, specifically. The technology I imagine that the gloves would be built on is the same used in skintight motion capture suites and also incorporating many rotational sensors and pressure sensors, thus precisely detecting each trivial movement in the user’s hand.
Lastly, and designed in the most detail in this first iteration, is the touchscreen UI. I wanted it to be a format that was both high-tech and also already currently understood by most of society. So I chose an interface resembling a touchscreen tablet. I kept it as simple as possible while still including all of the necessary components.



I would say that overall I am very happy with my design, and would be thrilled if I could actually build this device an use it. However, I admit I am not entirely satisfied with the design of the robotic component sans arms/hands (those, I’m fine with). It just looks a bit flimsy and unrealistic now that I look at it after all is said and done. I know that my intent was to make it such that it could be made to be collapsible, but I think that a lot more research and technical analytics would have to put into the design of that part.
I had a lot of fun with this piece, and could definitely see it being something to continue with later on. Hopefully by then I would actually have the resources to actually attempt a final design and creation of this product!
I had a lot of fun with this piece, and could definitely see it being something to continue with later on. Hopefully by then I would actually have the resources to actually attempt a final design and creation of this product!
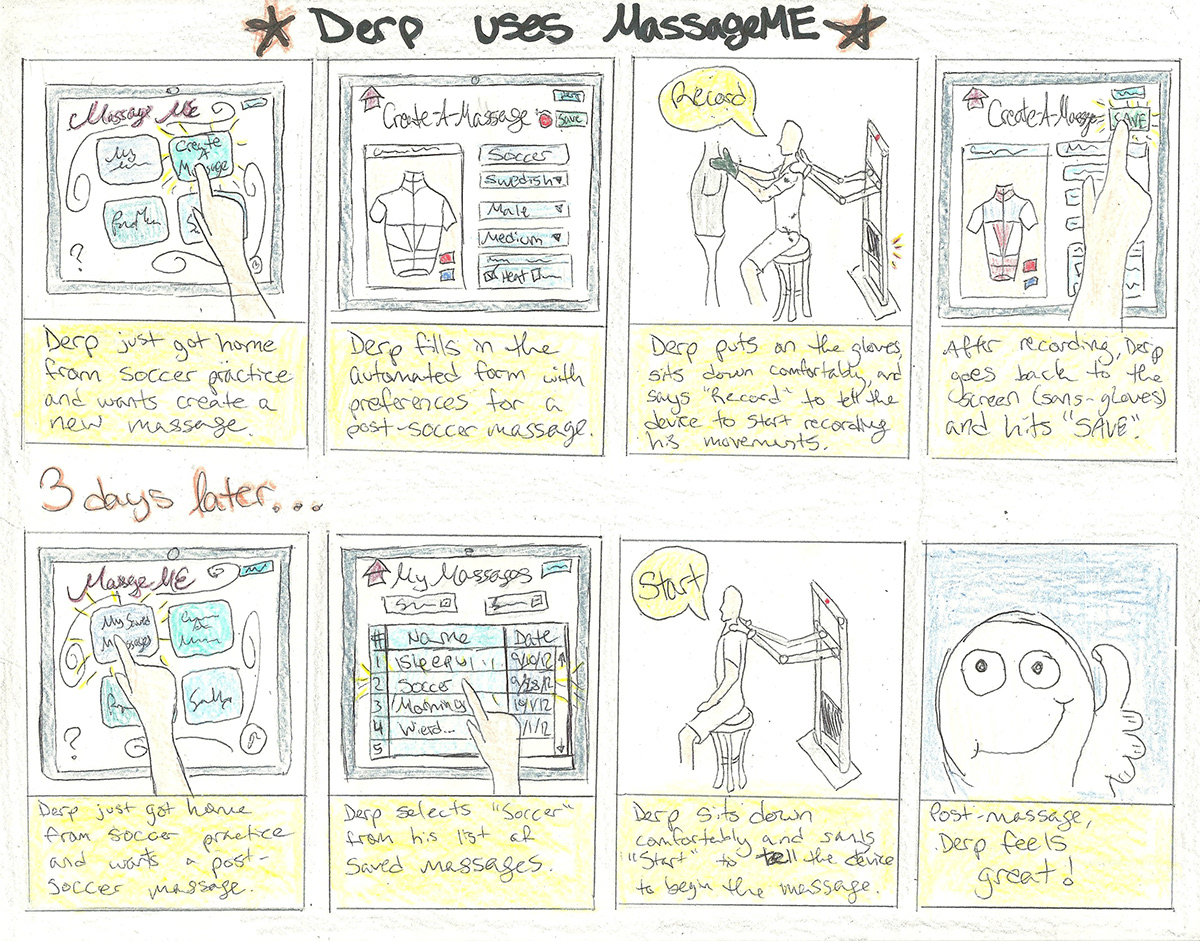
Note: There is voice activation implementation that the user needs in order to tell the device to "Start" a massage, "Record" motions, or "Stop" either of the preceding two. (This is discussed a bit more in the full report below.)
For the full report, here is the link to the GoogleDoc.

